PHYS 2.1: Introducing motion |
PPLATO @ | |||||
PPLATO / FLAP (Flexible Learning Approach To Physics) |
||||||
|
1 Opening items
1.1 Module introduction
Many of the most interesting problems in physics involve motion; the movement of planets and satellites for example, or the motion of high speed electrons as they are whirled around in a particle accelerator. This module provides an introduction to the study of motion. Its main aim is to enable you to describe and analyse simple examples of motion in an exact and concise way.
The module starts with a brief discussion of three–dimensional space and the way in which a Cartesian coordinate system can be used to fix the location of an object in space. During this discussion position, displacement and distance are defined and the distinction between a vector and a scalar is explained. Having established the three–dimensional nature of space and the difficulties of working in three dimensions, Subsection 2.3 introduces the simplifying concept of linear motion, i.e. motion along a straight line. By concentrating in the rest of the module on examples of linear motion, such as objects falling under gravity or cars accelerating along straight roads, we are able to explore some of the fundamental features of motion in a one–dimensional context, without having to make use of vectors. In particular, we show how position–time graphs can be used to describe linear motion. By considering such graphs we are led, in Section 3, to important concepts such as uniform motion, average velocity and instantaneous velocity.
Section 4 continues this graphical approach by using velocity–time graphs to describe examples of linear motion in which the velocity is changing with time and introduces the concept of acceleration, giving specific definitions of average acceleration and instantaneous acceleration.
Section 5 shows how the linear motion of a particle may be described algebraically, so that information can be obtained from the manipulation of equations rather than by drawing graphs. The equations involved in this process are generally called equations of motion, and special attention is paid to the uniform motion equations (when the particle has a constant velocity) and the uniform acceleration equations (when the particle has constant acceleration). By starting in three dimensions and then particularizing to one, we lay a firm foundation for later studies and avoid many of the pitfalls that open–up when one–dimensional motion is treated in isolation without due regard to the real world of three–dimensional space.
The mathematical techniques of calculus are not used in this module. However, the notation of the calculus is introduced so that you will have an opportunity to become familiar with its physical significance before being called upon to use it in a mathematical context. The following problem illustrates the sort of question you will be able to answer by the end of this module. (The solution is given in Subsection 5.3.)
According to the Highway Code, a car travelling along a straight road at 30 mph (i.e. about 13.3 m s−1, read as 13.3 metres per second) can stop within 23 metres of the point at which the driver sees a hazard. This is known as the stopping distance. If the driver always takes 0.70 s to react to a hazard and apply the brakes, what is the stopping distance at 70 mph (i.e. about 31.1 m s−1) assuming the same deceleration as at 30 mph?
1.2 Fast track questions
Study comment Can you answer the following Fast track questions? If you answer the questions successfully you need only glance through the module before looking at the Subsection 6.1Module summary and the Subsection 6.2Achievements. If you are sure that you can meet each of these achievements, try the Subsection 6.3Exit test. If you have difficulty with only one or two of the questions you should follow the guidance given in the answers and read the relevant parts of the module. However, if you have difficulty with more than two of the Exit questions you are strongly advised to study the whole module.
Question F1
A car accelerates uniformly along a straight road, so that its speed increases from 15 m s−1 to 25 m s−1 in 9.0 s. Calculate its acceleration.
Answer F1
Given that ux = 15 m s−1, υx = 25 m s−2 and t = 9.0 s, where ux and υx are the initial and final speeds, respectively, and using the definition of (uniform) acceleration as the rate of change of velocity we obtain
$a_x = \dfrac{\upsilon_x-u_x}{t} = \rm \dfrac{(25-15)\,m\,s^{-1}}{9.0\,s} = 1.1\,m\,s^{-2}$
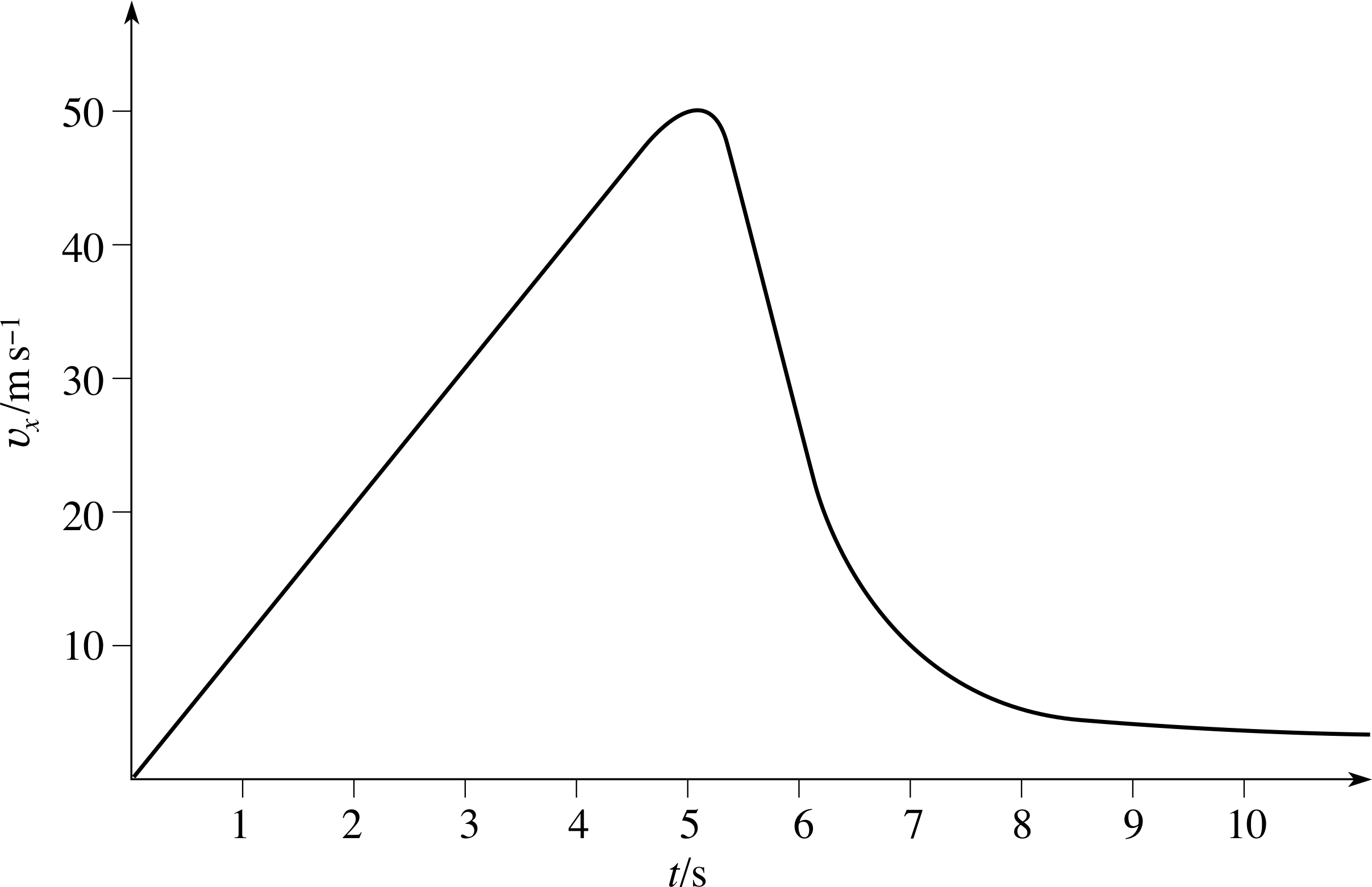
Figure 1 See Question F2.
Question F2
The graph in Figure 1 represents the motion of a parachutist.
(a) For how long did the parachutist fall before opening the parachute?
(c) How far did the parachutist fall before opening the parachute?
(b) What was the acceleration during this time?
(d) What was the approximate acceleration one second after opening the parachute?
Answer F2
(a) From the graph (Figure 1), we can see that the parachutist fell for 5 s before opening the parachute.
(b) The acceleration is equal to the gradient of the velocity–time graph, ∆υx /∆t, between 0 s and 5 s, i.e.
(50 − 0) m s−1/(5 − 0) s = 10 m s−2.
The acceleration is directed vertically downwards since that is the direction of increasing x in this case. (This is, as might be expected, the acceleration due to gravity.)
(c) The displacement from the start of the descent until the parachute was opened is given by the average velocity multiplied by the time, or by the area under the velocity–time graph between 0 s and 15 s.
sx = $\langle \upsilon_x\rangle$ × t = (50 m s−1 × 5 s)/2 = 125 m
Thus, the parachutist fell a distance | sx | = 125 m before opening the parachute.
(d) The acceleration after the parachute opened is given by the gradient of the velocity–time graph for that part of the motion, roughly
$a_x = \dfrac{\upsilon_{x2}-\upsilon_{x1}}{t_2-t_1} = \rm \dfrac{(20-50)\,m\,s^{-1}}{(6-5)\,s} = -30\,m\,s^{-2}$
Thus, the acceleration during this stage is 30 m s−1 vertically upwards.
Question F3
What is the difference between a vector and a scalar? What is meant by the magnitude of a vector, and what is wrong with the statement | a | = −3?
Answer F3
A vector has magnitude and direction. A scalar has no direction. The magnitude of a vector is the ‘length’ or ‘size’ of that vector and so | a | can never be negative.
Study comment Having seen the Fast track questions you may feel that it would be wiser to follow the normal route through the module and to proceed directly to the following Ready to study? Subsection.
Alternatively, you may still be sufficiently comfortable with the material covered by the module to proceed directly to the Section 6Closing items.
1.3 Ready to study?
Study comment To begin to study this module you will need to be familiar with the following terms: axes, Cartesian coordinates, gradientgradient of a line, graph, origin, SI units and tangent_to_a_curvetangent. If you are unsure of any of these terms you should refer to the Glossary, which will also indicate where in FLAP they are developed. The following questions will establish whether you need to review some of these topics before beginning to work through this module.
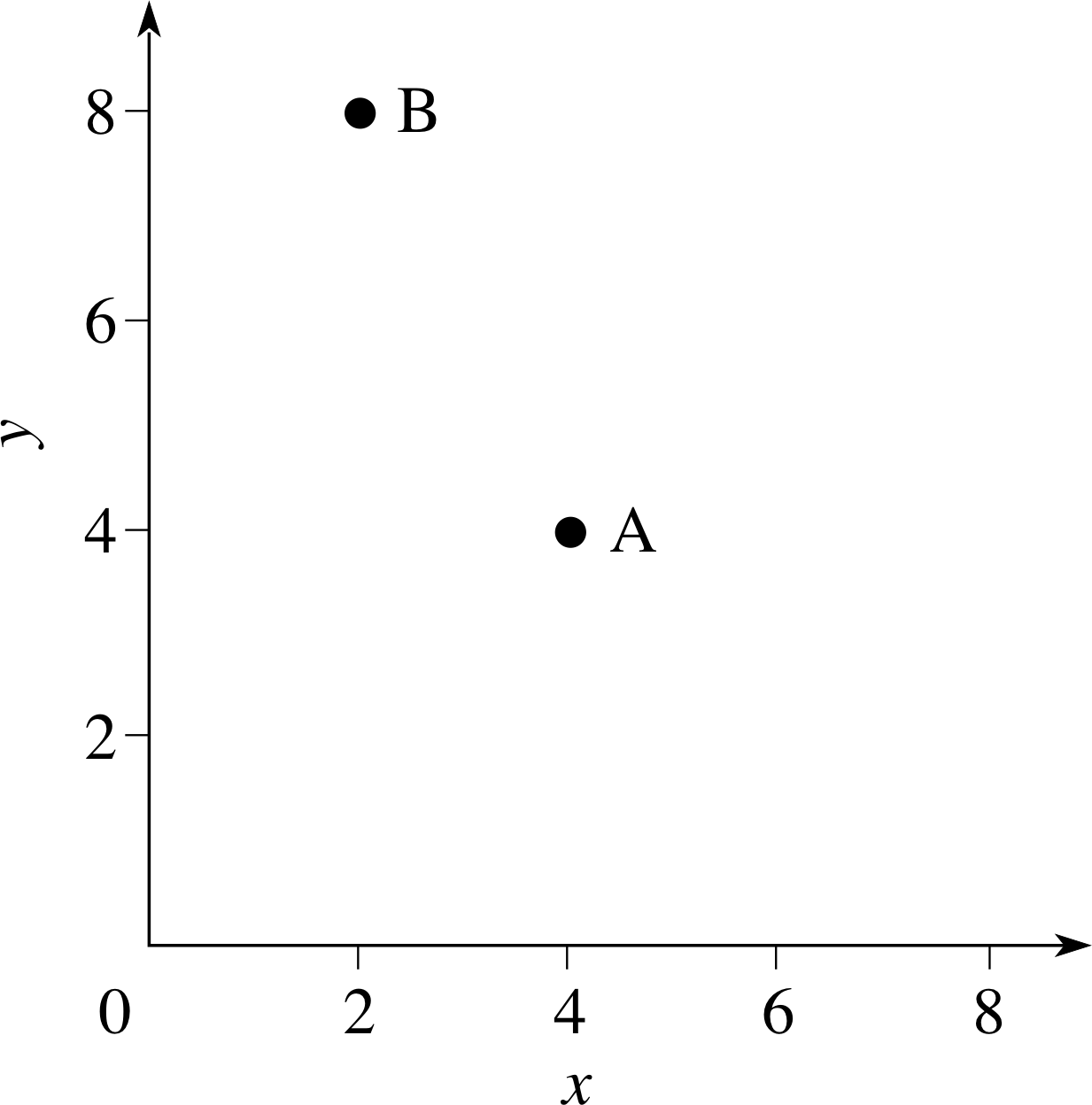
Figure 2 See Question R1.
Question R1
Write down the (Cartesian) coordinates of the points A and B on Figure 2 and mark the origin with an O.
Answer R1
The Cartesian coordinates of A and B are (4, 4) and (2, 8), respectively. The origin is the point on the graph where the x– and y–axes meet.
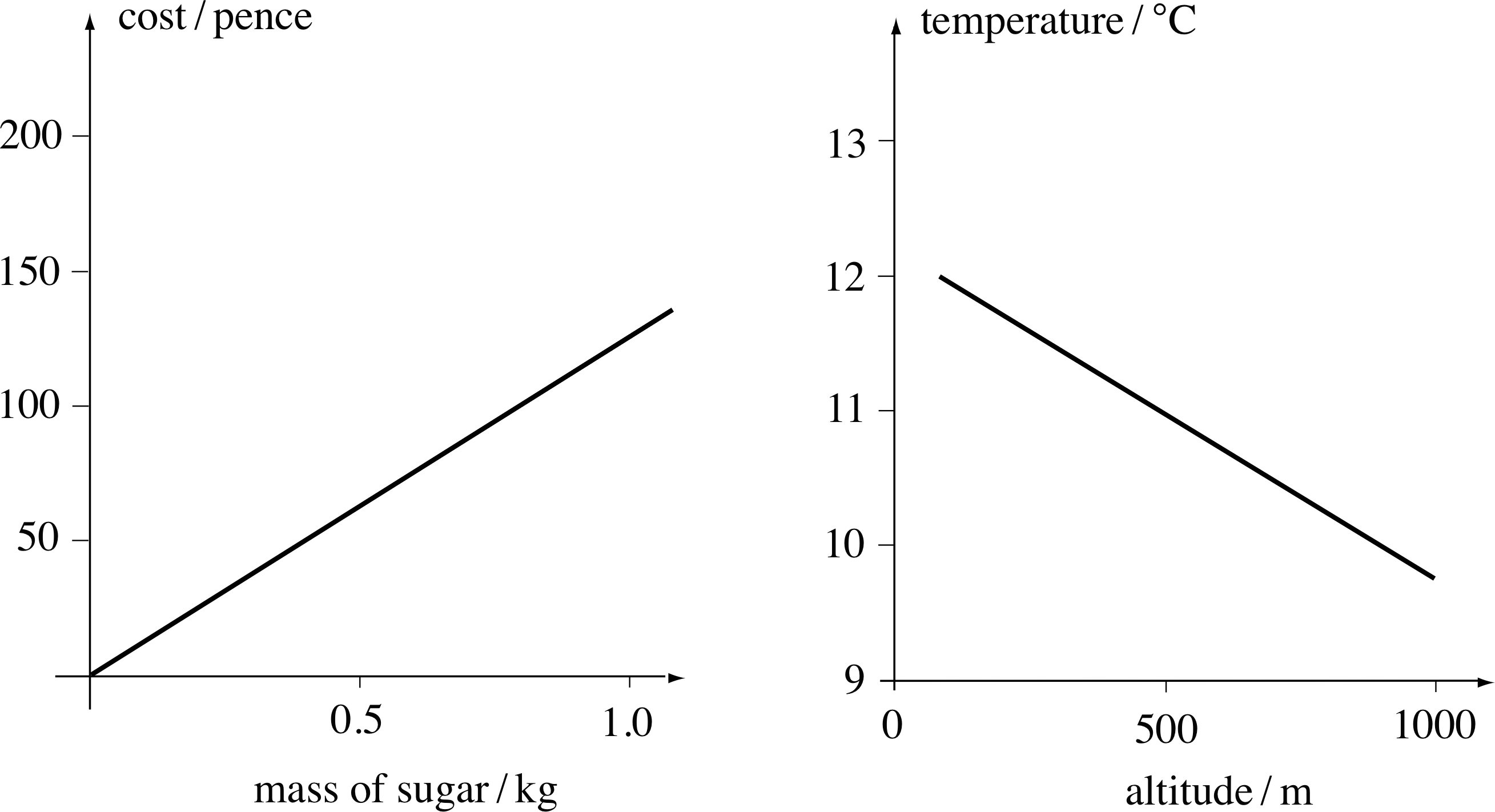
Figure 3 See Question R2.
Question R2
What are the gradients (including the appropriate units) of the two lines in Figure 3?
Answer R2
The gradient of the left–hand graph is approximately 130 pence kg−1. The gradient of the right–hand graph is approximately −(2.5/1000)°C m−2, or −0.0025°C m−1, or −2.5 × 10−3°C m−1.
To find the gradient of any straight line select two convenient points on the line and, between them, measure the horizontal distance in scale units (the run) and the vertical distance in scale units (the rise), taking due account of signs.
The gradient of the line is then given by gradient = rise/run.
For further information about gradients consult the Glossary.
Question R3
What are the SI units of mass, length and time?
Answer R3
Mass, kilogram (kg); length, metre (m); time, second (s).
For further information about SI units, consult the Glossary.
2 Position, displacement and motion
2.1 Positions and position vectors
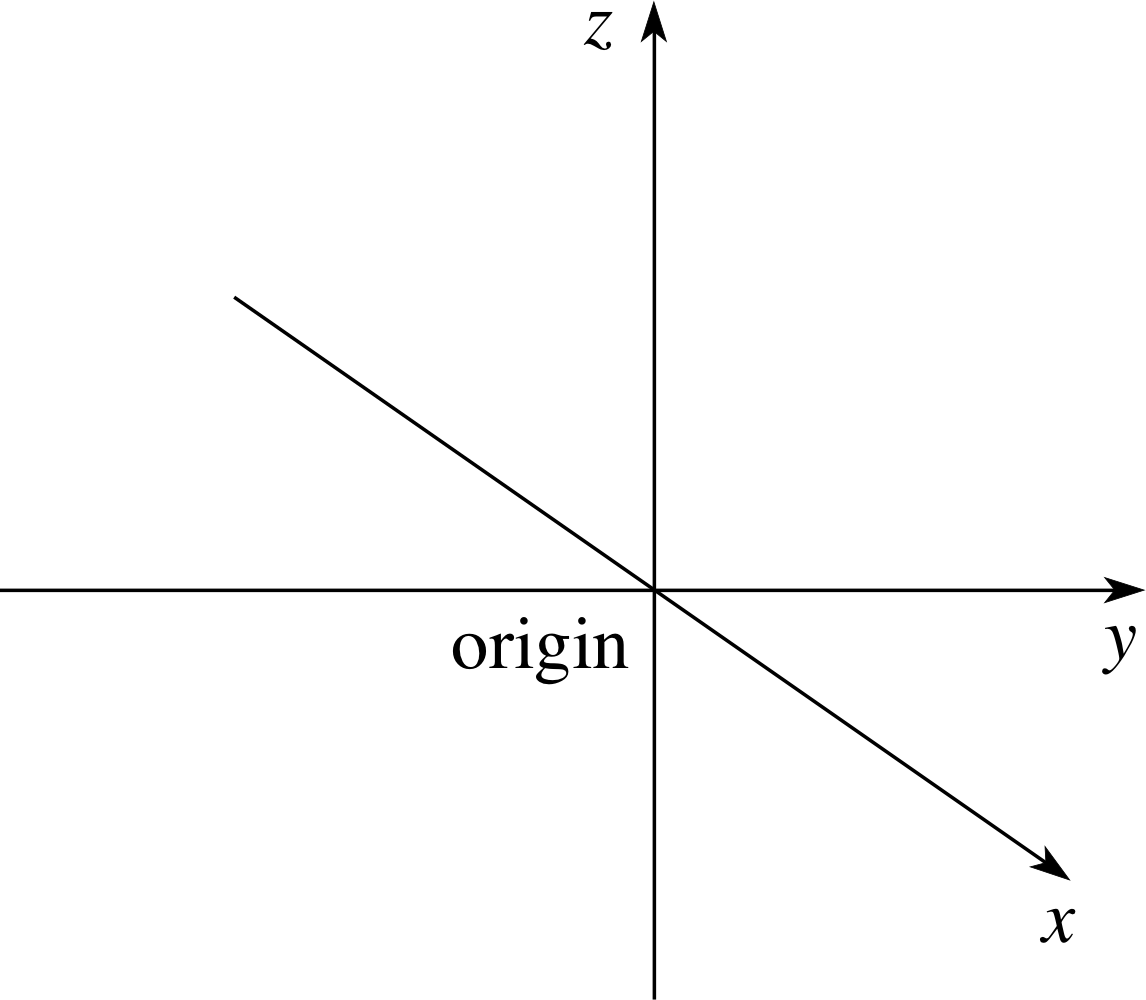
Figure 4 A three–dimensional Cartesian coordinate system. (It should be noted that the z–axis of a three–dimensional coordinate system may be oriented in one of two ways (up or down) relative to the x and y–axes. The orientation shown in this figure is the most conventional and constitutes what is known as a right-handed coordinate system. Reversing the direction of the z–axis would produce an unconventional left-handed coordinate system.)
It is a basic fact of life that we can only move in three independent directions: to the left and right, up and down, back and forward. Any other movement can always be produced by a suitable combination of these three. We describe this state of affairs by saying that space – which consists of all the possible positions that an object might have in three dimensional. It follows from this that if you want to describe the position of an object fully you must specify its location with respect to three independent directions. The most common way of doing this uses a three–dimensional Cartesian coordinate system, like that shown in Figure 4.
Such a system is obtained quite simply by adding a third axis (the z–axis) at right angles to the x and y–axes that make up the two–dimensional Cartesian coordinate systems with which you are already familiar. As in the two–dimensional case, the point at which the axes intersect continues to be called the origin.
Both the point in space at which the origin of a particular coordinate system is located, and the orientation of that system (i.e. which way the mutually perpendicular axes point) can be chosen arbitrarily. However, once such choices have been made it is important to stick to them so that the location of any point in space can be specified by its three position coordinates with respect to that coordinate system. The way in which the position coordinates of a point are determined is probably familiar to you – the process is illustrated in Figure 5 for the sake of completeness.
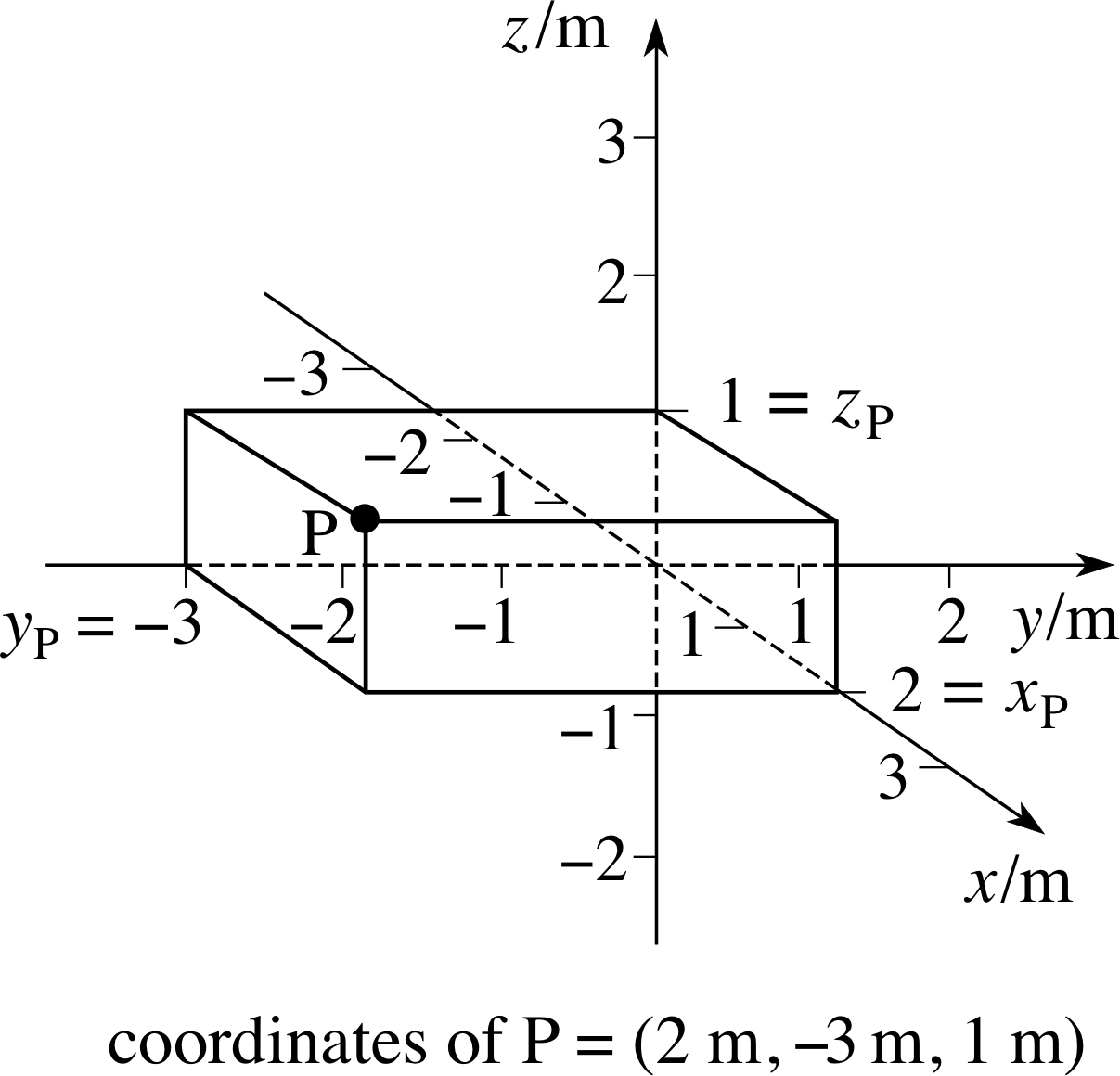
Figure 5 Determining the position coordinates of a point P.
The position coordinates of a point are usually written in the order x, y, z and enclosed in brackets (parentheses) to avoid confusing them. Thus the coordinates of point P in Figure 5 would normally be written
(xP, yP, zP) = (2 m, −3 m, 1 m)
Note that each position coordinate may be positive or negative according to which side of the origin the relevant perpendicular intersects the corresponding axis.
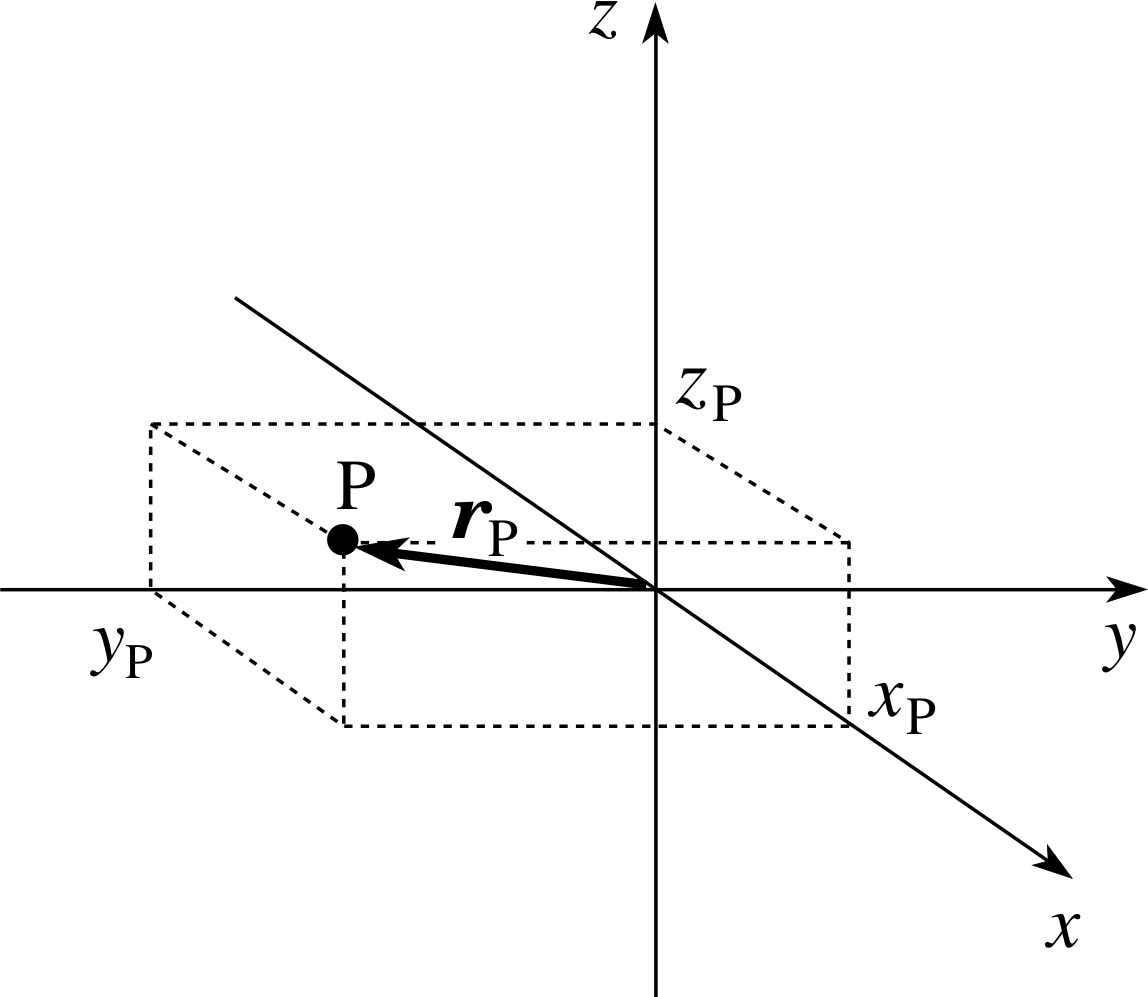
Figure 6 The position vector rP of a point P.
An alternative way of describing the three–dimensional position of a point such as P is in terms of its position vector. This can be thought of as an arrow i stretching from the origin of the coordinate system to the point in question (Figure 6). Now arrows have length and direction, so they are quite different from physical quantities such as mass and energy that have no particular direction associated with them. For this reason it makes good sense to use a special symbol to distinguish a position vector (or any other directed quantity) from quantities that have no direction. It is conventional to emphasize the special nature of directed quantities – which are generally called vectors – by using bold letters to represent them. Thus the position vector of point P might be denoted rP.
rP = position vector of point P
Quantities such as mass and energy that have no direction are called scalars and are usually represented by ordinary (non-bold) letters such as m and E.
Since a position vector is an alternative way of specifying the location of a point with respect to a given coordinate system there must be an intimate relationship between the position vector of a point and the position coordinates of that point. In fact, a position vector r of a point with position coordinates (x, y, z) is often specified by an equation of the following form
r = (x, y, z)(1)
In this context x, y and z, the position coordinates of the point in question, are referred to as the x, y and z components_of_a_vectorcomponents of the position vector r. Note that each of the components is a scalar quantity which may be positive or negative. The vector r may therefore be represented by an ordered arrangement of three scalar quantities, its three components.
Aside Distinguishing vectors by a bold typeface is fine in print, but it presents a problem for those using pens or pencils. How are you going to show that r is a vector when you write it down? Fortunately there is a simple way of indicating vectors in handwritten work. When authors are preparing material to be printed they show that an item should be set in boldface type by putting a wavy underline beneath it. What is written as r~ will be read and printed as r. Unless you have been instructed to distinguish vectors from scalars in some other way, you should adopt this convention in all your written work.
2.2 Displacement and distance
It should be clear from Figure 6 that the distance from the origin of the coordinate system to the point P is nothing other than the length of the position vector rP. When dealing with vectors of any kind, including position vectors, it is customary to use the term magnitude_of_a_vector_or_vector_quantitymagnitude when referring to their length, so we can say, quite generally:
The distance from the origin of a coordinate system to any particular point is given by the magnitude of the position vector of that point.
It is worth noting that the magnitude of a vector cannot be negative. (A length may be positive or zero, but it can’t possibly be less than zero!) Because of this it is usual to denote the magnitude of any position vector r by | r |, since mathematicians use a similar notation to indicate the non–negative value they call the modulus or absolute value of any ordinary number. Of course, | r | is just a scalar quantity so it is also common to see it represented by the usual scalar symbol r. Using these notations for the magnitude of a vector we can say
r = | r |, the magnitude of the position vector r of a point, represents the distance from the origin of a coordinate system to that point. i
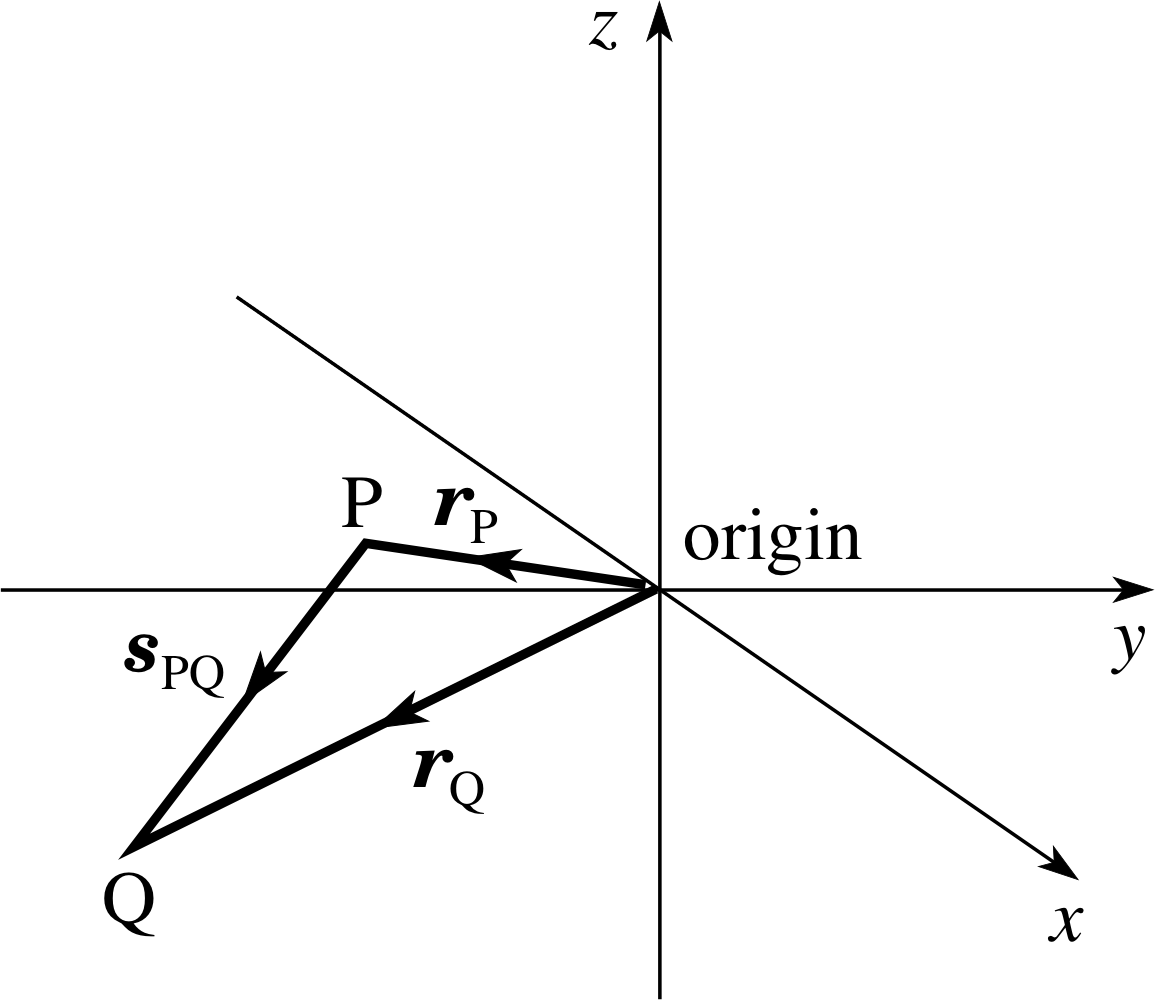
Figure 7 The displacement sPQ from P to Q.
Positions are always measured with respect to the origin of a coordinate system, but quite often we are more interested in the location of one point relative to another rather than in the location of either relative to the origin. For instance, if an object moves from a point P to a point Q so that its position vector changes from rP to rQ (see Figure 7), we may be more interested in knowing the distance and direction from P to Q than in specifying the position of either P or Q relative to the origin. The quantity that describes the difference in the two positions is called the displacement from P to Q and may be denoted sPQ. As its bold symbol indicates, the displacement sPQ is another vector quantity since both a magnitude and a direction are required for its specification. This information is often provided by expressing the displacement in terms of its scalar components, as in the case of a position vector. Thus you will often see a general displacement s defined by an equation of the form:
s = (sx, sy, sz)
where sx, sy and sz are, respectively, called the x, y and z–components of the displacement.
We shall have more to say about the determination of these components later but for the present we shall just note two important properties of displacement:
- Position vectors are a special class of displacements – they are displacements from the origin to the points in question.
- The magnitude of the displacement from one point to another represents the distance between those two points. Thus, in general:
s = | s |, the magnitude of the displacement from one point to another, is the distance between those two points.
✦ If s is the displacement from one point to another, what is wrong with the statement | s | = −3 m?
✧ In physical terms, | s | is the distance between the two points and it makes no sense to speak of a negative distance. In mathematical terms the quantity | s | cannot be negative.
2.3 Linear motion – from three dimensions to one
So far our discussion has been fully three-dimensional, just as much of physics has to be. However, in the rest of this module we shall be mainly concerned with linear motion – i.e. the motion of an object along a straight line. Although the line may point along any direction in three–dimensional space, the motion itself is really one-dimensional. If we choose to locate the origin of a coordinate system on the line and to orientate one of the axes, the x–axis say, along the line, then all the possible positions of the moving object can be specified by values of the single position coordinate x – and that’s what characterizes one–dimensional motion. By confining our attention to one dimension we will be able to explore some of the basic features of motion without having to make much use of vector notation. On the other hand, because we have started from a fully three–dimensional (vector) point of view the results we obtain will be easy to generalize to three dimensions.

Figure 8 An example of one–dimensional (linear) motion.
As a definite example, consider Figure 8 which shows a car moving along a straight line away from a pedestrian. The line has been designated as the x–axis of some coordinate system and the origin located at a fixed point between the car and the pedestrian. The position of the car at any instant is completely specified by a single position coordinate x, which may be positive or negative according to whether the car is to the right or the left of the origin. Similarly, the displacement from one point on the line (the position of the pedestrian, x1, say) to any other point on the line (such as the position of the car, x2) can be specified by a single positive or negative quantity – the x–component of displacement sx given by
sx = x2 − x1(2)
In the rest of this module, when dealing with one–dimensional motion along the x–axis, we shall usually refer to the position and displacement components x and sx simply as ‘the position’ and ‘the displacement’, respectively, since each effectively specifies the corresponding vector quantity even though each is, in reality, only one component of that vector. Of course it’s still the case that the magnitude of a displacement is a distance but even this is simplified in a one–dimensional problem since all you have to do to work out the distance from one point to another is to subtract the lesser value of x from the greater so that you get a positive result.
✦ In Figure 8, what is the displacement from the car to the pedestrian? What is the distance from the car to the pedestrian?
✧ The pedestrian is 50 m to the left of the car and position coordinates are increasing to the right, so the displacement from the car to the pedestrian is −50 m. Alternatively, using Equation 2,
sx = x2 − x1
sx = x2 − x1 = −20 m − (+30 m) = −50 m
The distance from the car to the pedestrian is | sx | = 50 m.
| Time t/s |
Position coordinate x/m |
|---|---|
| 0 | 0 |
| 5 | 1.7 |
| 10 | 6.8 |
| 15 | 15 |
| 20 | 26 |
| 25 | 39 |
| 30 | 53 |
| 35 | 68 |
| 40 | 84 |
| 45 | 99 |
| 50 | 115 |
| 55 | 131 |
| 60 | 146 |
2.4 Position–time and displacement–time graphs
To describe the motion of the car in Figure 8, we can determine its position at various times and then display the results in a suitable way. For example, we could choose the origin of time – the moment at which we start the clock and record time t = 0 – to be when the car passes the origin. We might then choose to measure the car’s position (i.e. its displacement from the origin) at 5-second intervals for 1 minute. The results are shown in Table 1.
Note how the units are shown in such tables. The oblique slash (/ ) denotes a ratio, thus
$ x\rm{/m} = \dfrac{\text{position coordinate in metres}}{\text{1 metre}}$(3)
so the units cancel and the entries in the table are just numbers.
These data could also be displayed visually by plotting them as points on a graph. Of course, there are conventions to bear in mind when drawing such a graph:
- Time, the independent variable, should be plotted along the horizontal axis and position, the dependent variable, along the vertical axis. i
- The axes should be labelled to show what is being plotted and the label should include an oblique slash (/ ) followed by the appropriate units, as in the table headings.
- SI units should be used unless there are good reasons to do otherwise.
Question T1
Plot the values in Table 1 as points on a graph and draw a smooth curve through the points. i Label the axes as described above.
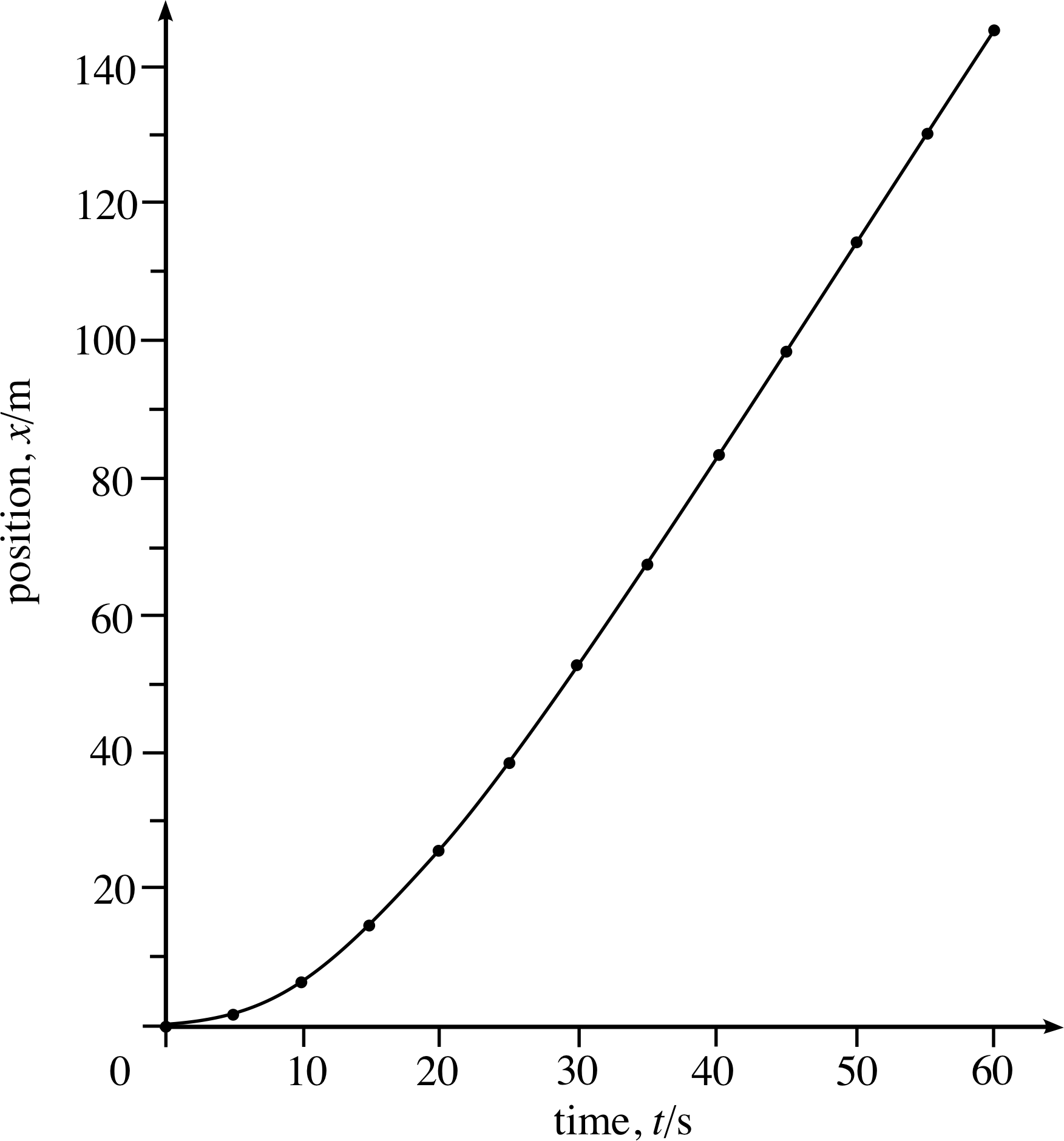
Figure 21 See Answer T1.
Answer T1
Your position–time graph from Table 1 should look like Figure 21.
The graph you have just drawn in response to Question T1 is known as a position–time graph. Using the graph, you can read off the position of the car at any given time, or the time at which the car reaches a given position.
Question T2
Use your graph (from Question T1) to estimate the position of the car after 32 s and the time it takes to travel the first 100 m.
Figure 21 See Answer T2.
Answer T2
The position after 32 s is approximately 60 m and the time to travel the first 100 m is approximately 45 s.
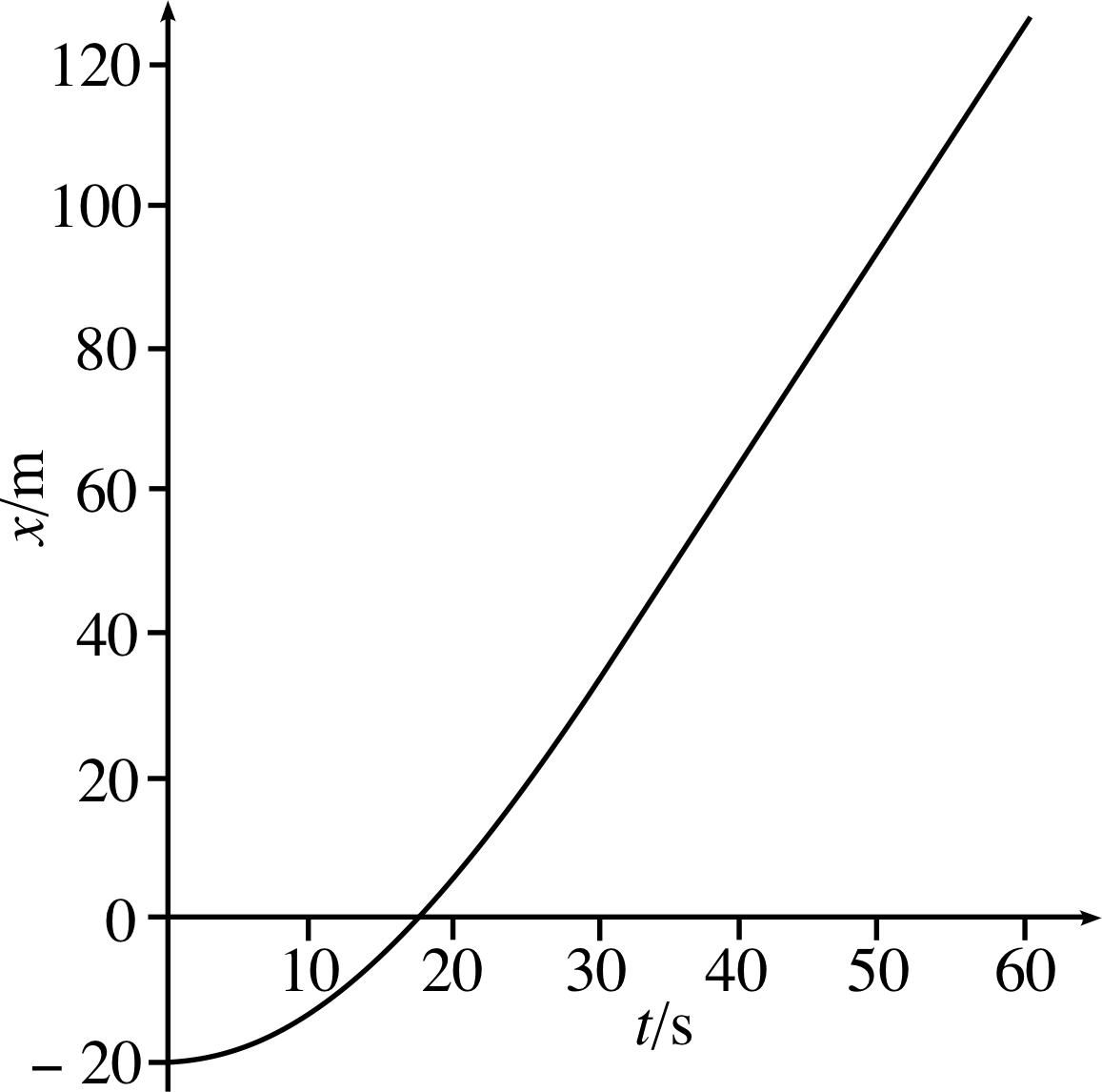
Figure 9 The position–time graph resulting from a change of origin.
The position–time graph of any linear motion provides a very simple description of that motion. It enables you to see the way in which x changes throughout the motion and helps you to appreciate the precise way in which x is determined by t. As a mathematician would say, it shows x as a function of t.
It is important to realize that the precise form of a position–time graph depends on the choice of origin and orientation of the x–axis. For example, Figure 9 shows a position–time graph for the moving car described above, but this time the motion is described in terms of a different coordinate system in which the origin has a different location.
✦ Where is the new origin?
✧ It must be 20 m to the right of the old origin, as in Figure 10. The journey now starts at a position −20 m from the origin.

Figure 10 The new coordinate system. (The new origin is displaced (+)20 m from the old origin, i.e. 20 m to the right.)
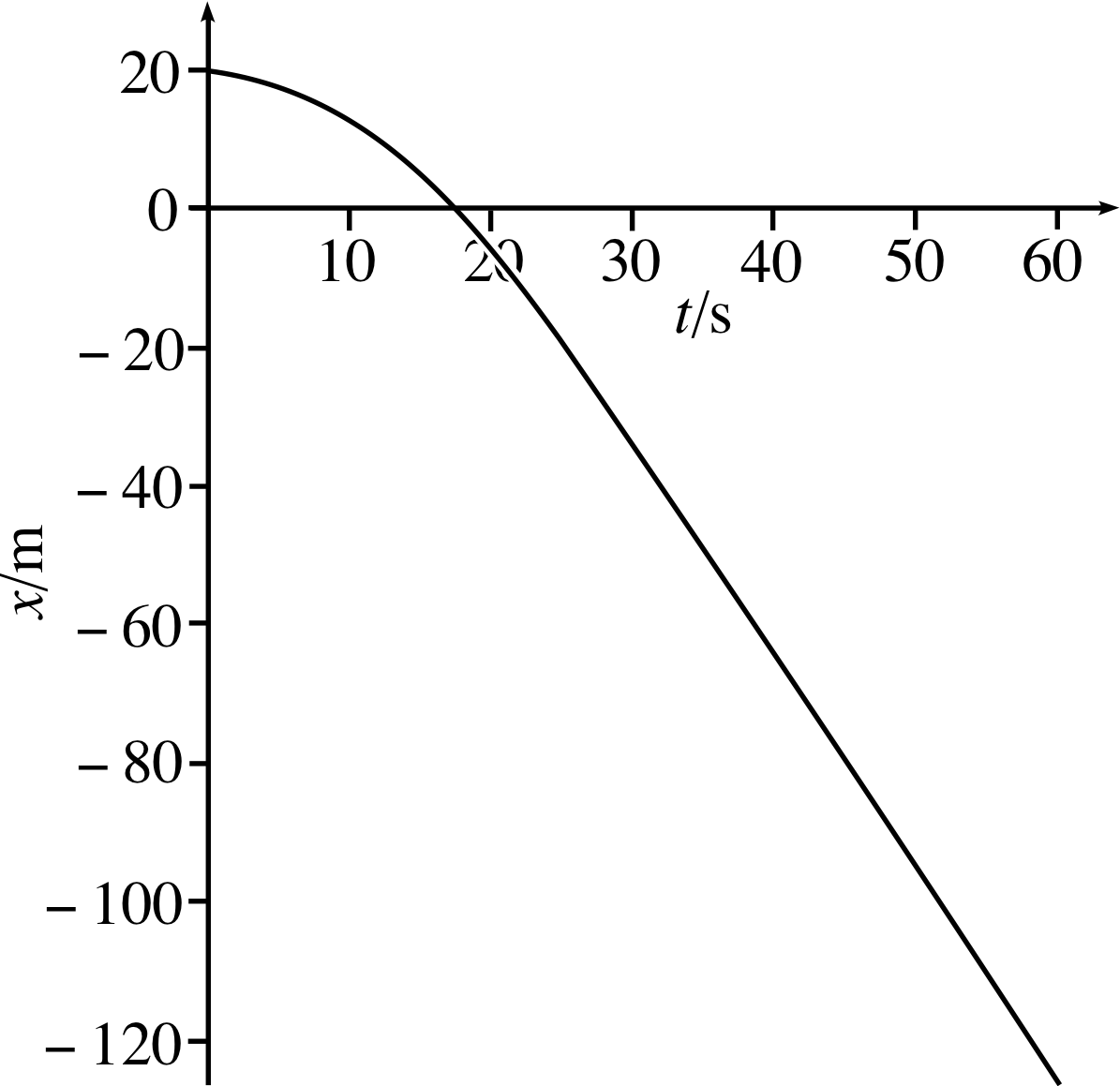
Figure 11 Another position–time graph for the moving car.
Figure 11 represents the same motion again, but an even more radical change of coordinate system has taken place.
Question T3
How is the coordinate system used to produce Figure 11 related to the original system shown in Figure 8?
Answer T3
Figure 10 The new coordinate system. (The new origin is displaced (+)20 m from the old origin, i.e. 20 m to the right.)
This time the origin is located in the same place as in Figure 10, i.e. at +20 m from the origin of Figure 8, but the x–axis now points from right to left. Reversing the direction of increasing x turns the position–time graph upside down.
In addition to position–time graphs, we should also consider displacement-time and distance-time graphs as means of representing linear motion.
The displacement–time graph for linear motion – a plot of the displacement sx from some chosen reference point against time t – is often used in preference to the position–time graph. (Indeed, position–time graphs are just a special class of displacement–time graphs in which the reference point from which displacements are measured is the origin.) One of the potential advantages of a displacement–time graph is that the reference point does not have to be fixed.
Figure 8 An example of one–dimensional (linear) motion.
In the context of Figure 8, for example, it would be quite possible (and of interest to the pedestrian) to represent the motion of the car in terms of its changing displacement from the pedestrian even though both the car and the pedestrian are in motion. However, the distance–time graph of linear motion – a plot of the distance s from some reference point against time t – is generally less useful because it carries less information. Two different linear motions in opposite directions might well have the same distance–time graph even though their position–time graphs would be very different.
3 Velocity and speed
When describing the three–dimensional motion of an object relative to a coordinate system we often want to know how fast the object is travelling and in which direction. This information is given by the velocity of the object, which is simply the rate of change of the object’s position vector with time. Since changes in position involve both a direction and a magnitude it follows that velocity must also be a vector quantity that requires both a magnitude and a direction for its complete specification. For this reason velocity is usually denoted by the bold symbol υ. The magnitude of an object’s velocity is called its speed and is denoted | υ |, though often it is simply written as υ. Note that speed, like distance, can never be negative since it is the magnitude of a vector and magnitudes are never negative. Indeed, you can think of speed as the rate at which distance along the path of motion is being covered, so it can always be described by a value, such as 30 mph (or 13.3 m s−1), that can’t possibly be less than zero. Velocity on the other hand, since it is a vector quantity and involves direction, is generally specified by an equation of the form
υ = (υx, υy, υz) where the three components along the x, y and z–axes are each scalar quantities that may be positive or negative.
In what follows we shall once again avoid the difficulties of dealing with velocities in their fully three–dimensional form by restricting our attention to (one-dimensional) linear motion along the x–axis of a coordinate system. Under such circumstances the velocity of an object is entirely specified by the x–component of its velocity, υx, and the speed of such an object is given by
υ = | υx |(4) i
3.1 Constant velocity and constant speed
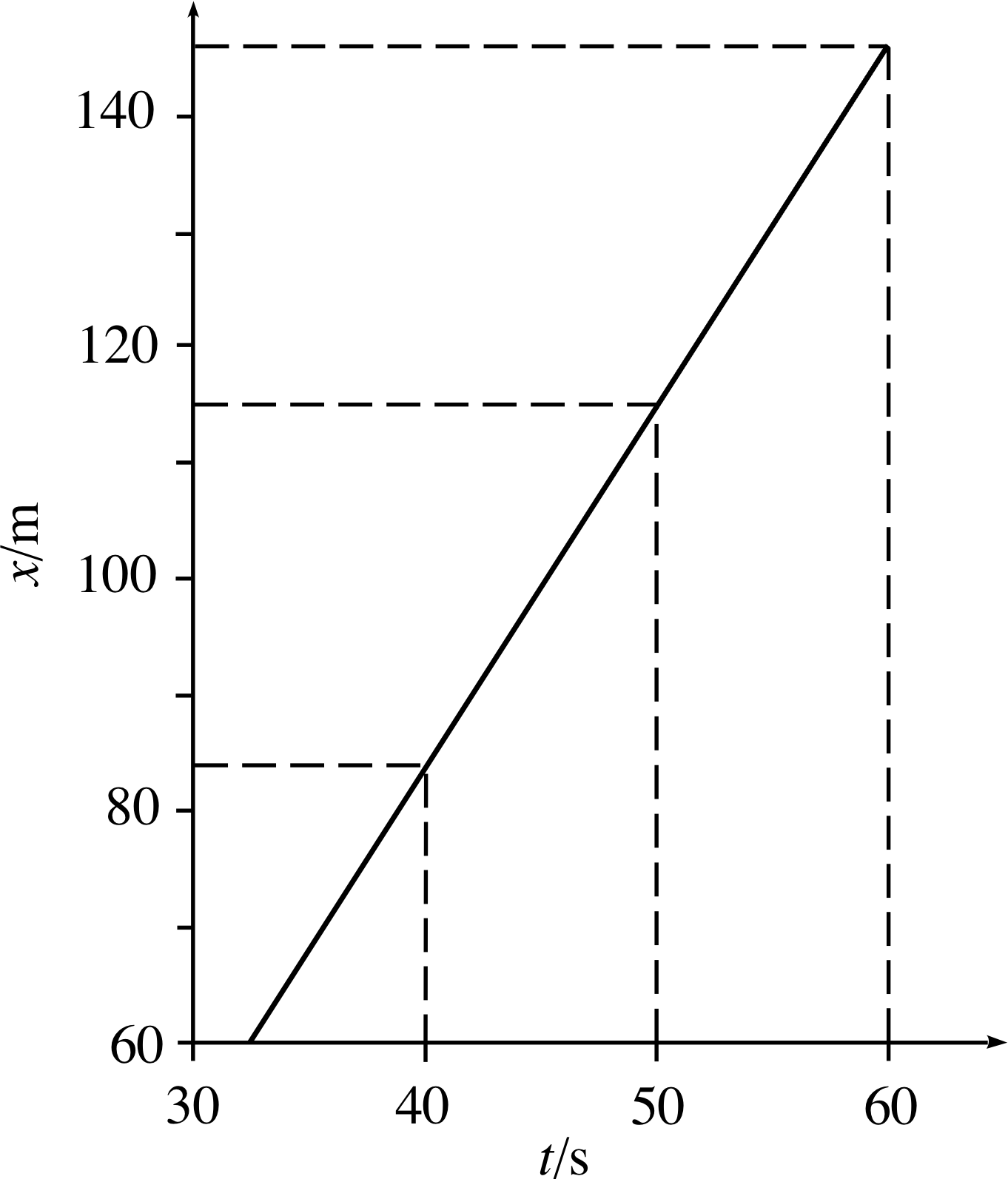
Figure 12 Expanded version of the linear part of the position–time graph for Question T1 (i.e. Figure 21).
The simplest case of linear motion is that of an object moving in a fixed direction and covering distance at a constant rate. Such an object is said to be moving with constant velocity and it is inevitable that such an object must also move with constant speed. Constant velocity motion is also known as uniform_linear_motionuniform motion and we say that in such motion objects have uniform velocity and uniform speed. You have already dealt with an object that moves in this way; to see this look again at the graph you drew in response to Question T1. You will notice that after about 30 s the graph appears to be a straight line, i.e. to be linear (see Figure 12). Equal changes in position coordinate are therefore occurring in equal intervals of time. This implies that the car is moving with constant velocity and consequently with constant speed.
If you look at the interval between 40 s and 50 s you can see that the position coordinate of the car changes from 84 m to 115 m at a uniform rate. This uniform rate of change of position is
$\upsilon_x = \rm \dfrac{(115 - 84)\,m}{(50 − 40)\,s} = 3.1\,m\,s^{-1}$
Thus the constant velocity of the car during this part of its journey is 3.1 m s−1.
The same value of the velocity is found by considering the change of position in any other interval of time on the same linear part of the graph.
✦ Calculate the velocity of the car in the above example by repeating the calculation over a different time interval, e.g. 50 s to 60 s.
✧ As expected, the answer is once again 3.1 m s−1.
✦ In what way does the velocity of 3.1 m s−1 that has just been calculated differ from a speed of 3.1 m s−1?
✧ The fact that the velocity is positive shows that the car is moving in the direction of increasing x values. If it had been moving in the opposite direction the velocity would have been −3.1 m s−1 but the speed would still have been 3.1 m s−1. Thus the speed carries no information about the direction of motion even if it happens to be numerically equal to the velocity.
✦ Two cars are moving along the same line at the same speed but they have different velocities υx1 and υx2. How are the velocities related?
✧ If the cars are moving with the same speed but have different velocities, they must be moving in opposite directions along the line. Therefore their velocities are opposite so υx1 = −υx2.
✦ In the case of linear motion, how can you tell by looking at a position–time graph that an object is moving at a constant velocity?
✧ If the position−time graph is linear, in other words, if the graph is a straight line, then the object must be travelling at a constant velocity, because equal changes in position coordinate occur in equal intervals of time.
Question T4
Figure 13 shows the position–time graphs for four different bodies, each moving with a different constant velocity. If you assume the position and time scales are the same in each case, arrange the bodies in order of increasing speed, indicate which have positive velocities, and arrange the bodies in order of increasing velocity.
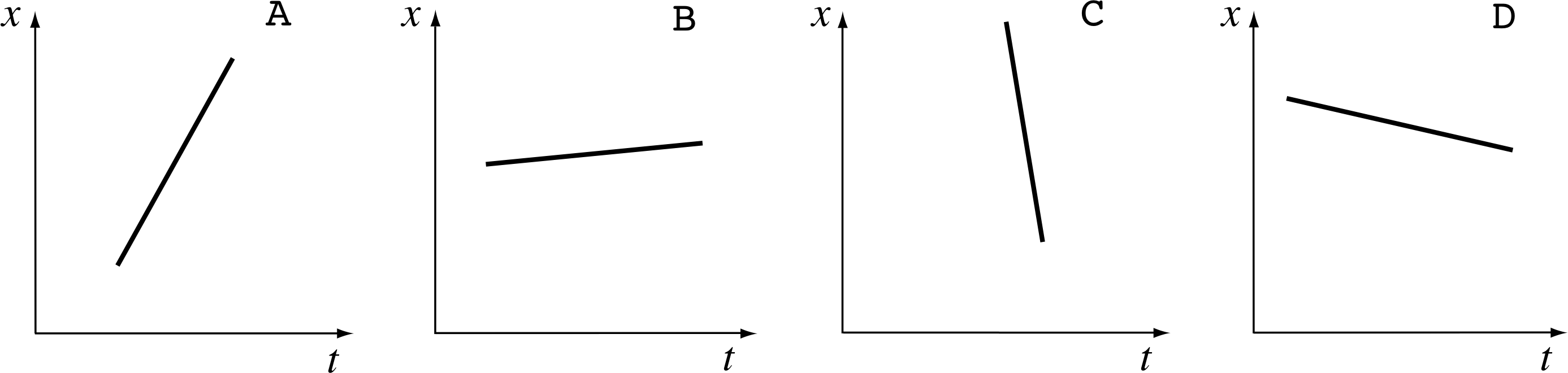
Figure 13 See Question T4.
Answer T4
The steeper the position–time graph, the greater is the change in position in a given interval of time and therefore the greater is the speed. Thus the correct ordering is B, D, A and C. However, only graphs A and B correspond to positive velocities, since these are the only cases in which the position coordinate increases with time. Thus, in order of increasing velocity, the graphs are C, D, B and A. Note that this is the order of increasing gradients of the graphs.
The point to remember about Question T4 is that in the case of uniform motion it is the steepness or gradient of the position–time graph that represents the velocity.
Note Gradient is a concept of crucial importance in this module. If you are in any doubt at all about how to evaluate a gradient go back and reread Question R2 (in Subsection 1.3) and its answer. Some authors use the term ‘slope’ in place of the term ‘gradient’.
3.2 Average velocity
If you look again at your graph for Question T1, you will see that in the interval from 0 s to 20 s the graph is curved. This indicates that the velocity is changing throughout that interval. Figure 14 is an expanded version of this part of the graph.
In this case the velocity is certainly not constant, but we can calculate the average velocity of the car during any specified interval of time, such as that from t1 to t2 which is of duration ∆t = (t2− t1). To determine the average velocity we use the same method as we employed to find the constant velocity in Subsection 3.1. The average velocity $\langle \upsilon_x\rangle$ over the specified time interval is obtained by dividing the change in position coordinate ∆x = (x2 − x1) by the time interval ∆t = (t2 − t1).
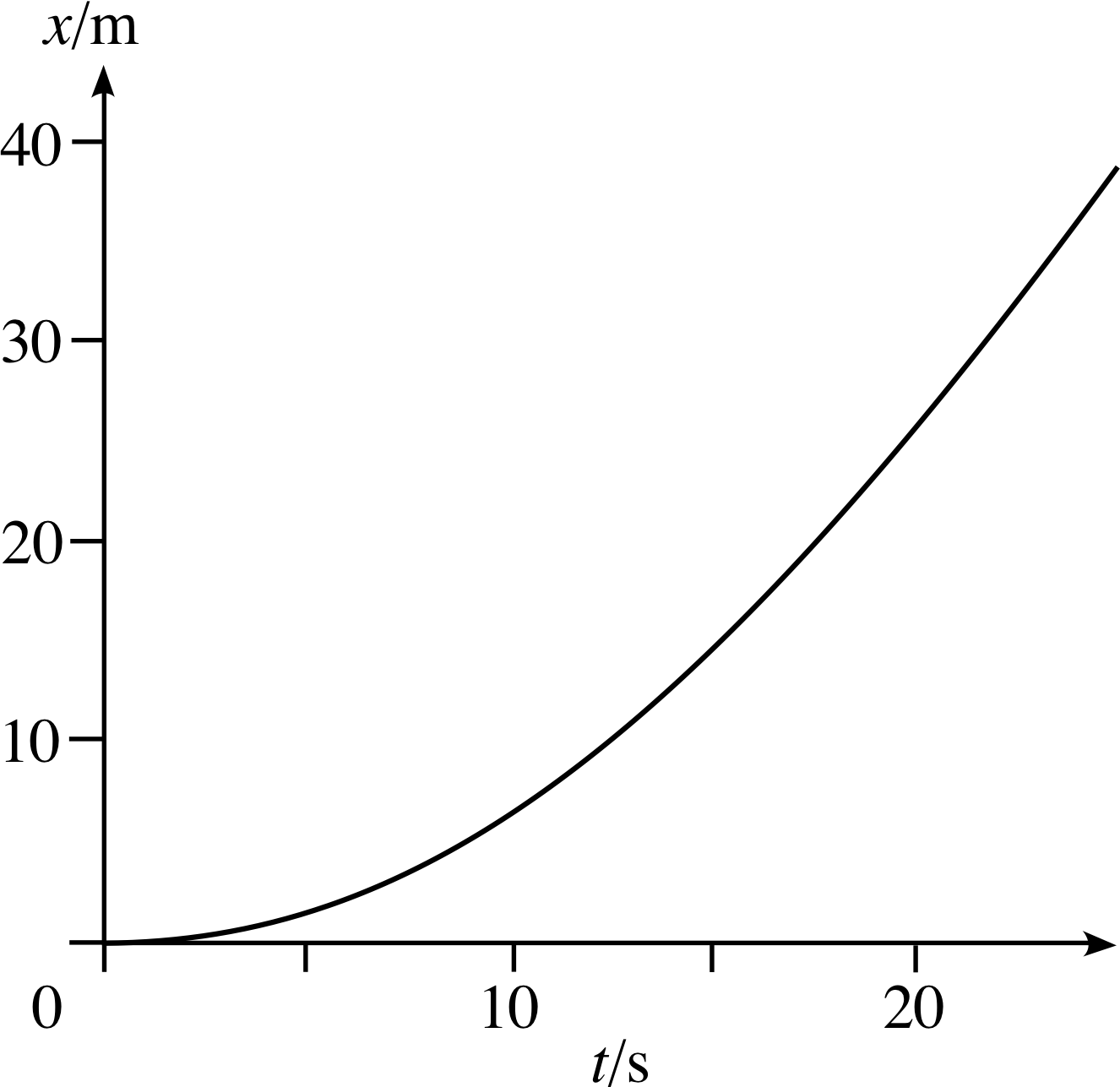
Figure 14 Expanded version of the curved part of the position–time graph for Question T1 (Figure 21).
$\langle \upsilon_x \rangle = \dfrac{\Delta x}{\Delta t} = \dfrac{x_2-x_1}{t_2-t_1}$(5) i
In Figure 14, the position changes from x1 = 2 m to x2 = 26 m over the interval from t1 = 5 s to t2 = 20 s. This means that the change in the car’s position is ∆x = x2 − x1 = 24 m over a time interval of duration ∆t = t2 − t1 = 15 s. Using Equation 5 the average velocity over the specified interval is 24 m/15 s = 1.6 m s−1.
We could have obtained this same result from Figure 14 in a slightly different way. Having identified the two points on the curve that correspond to the beginning and end of the interval we could have drawn a straight line between those points and then determined its gradient. The calculation we carried out above was simply one particular way of evaluating that gradient, any other way would have given the same answer. So, once again we see that a velocity – in this case an average velocity – is represented by the gradient of a line on a position–time graph.
Question T5
A physics student drives at an average speed of 30 mph to see a friend, who lives a distance of 60 miles away (you may take the problem as being one-dimensional!). On arrival she discovers that he has misunderstood the arrangements and has already left to drive to visit her. She returns home, driving at an average speed of 60 mph on the return trip. What is her average velocity for the whole journey? What is her average speed? If each left originally at the same time and his average speed is 20 mph, who arrives first at her house?
Answer T5
Her average velocity is given by Equation 5.
$\langle \upsilon_x \rangle = \dfrac{\Delta x}{\Delta t} = \dfrac{x_2-x_1}{t_2-t_1}$(Eqn 5)
Since x2 and x1 are the same (position of the student’s home) the change in position (x2− x1) = 0 and her average velocity is zero. Her total journey time is 3 h and the total distance covered is 120 miles, so her average speed is the total distance covered divided by time taken, or 120 miles/3 h = 40 mph. Her friend covers the 60 miles, at an average speed of 20 mph, and his journey time is therefore also 3 h, so they arrive at the same time. This question should encourage you to think carefully about averages and also about the distinction between speed and velocity.
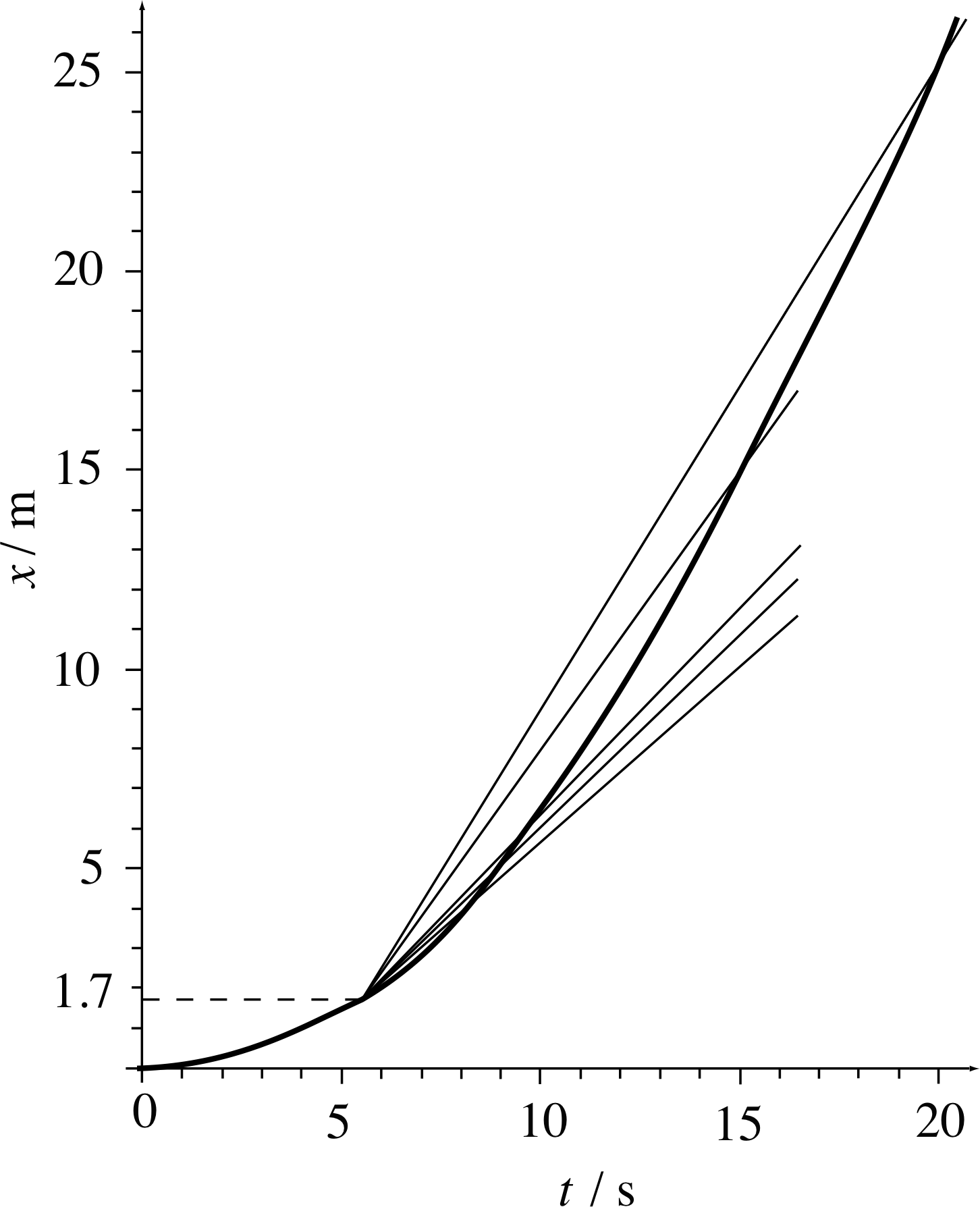
Figure 15 The average velocities (given by the gradients of the lines) approach a limiting value as the time intervals from 5 s get smaller and smaller.
3.3 Instantaneous velocity
The average velocity we calculated in Subsection 3.2 does not give us any information about the car’s velocity at any particular instant, say at a time t = 5 s. Such information is provided by another quantity called the instantaneous velocity, which may change from moment to moment. To obtain the instantaneous velocity at t = 5 s we need to find the average velocity over smaller and smaller time intervals around the instant t = 5 s.
Mathematically, this process of finding a better and better approximation to the car’s instantaneous velocity at a point by shrinking the interval ∆t over which the average is taken is said to be a limiting process; we speak of finding the limit i of the average velocity as the time interval shrinks to zero.
If you look at Figure 15 you will see how the average velocities (which are the gradients of lines passing through the graph at the time of 5 s) come closer to a limiting value as the time intervals from 5 s are made smaller and smaller.
Mathematically, this limiting value is denoted $\displaystyle \lim_{\Delta t\rightarrow 0} \dfrac{\Delta x}{\Delta t}$, so we can say:
In linear motion, the instantaneous velocity υx at any particular time is the limit of the average velocity as the time interval around that particular time is made smaller and smaller, i.e.
$\displaystyle \upsilon_x = \lim_{\Delta t\rightarrow 0} \dfrac{\Delta x}{\Delta t}$
As Figure 16 indicates, the limiting line that is being approached by the lines in Figure 15, as the interval ∆t approaches zero, is nothing other than the tangent i to the position–time graph at t = 5 s. So, the limiting velocity is just the gradient of that tangent, and it is this gradient that gives the instantaneous velocity of the car at t = 5 s. In the branch of mathematics known as calculus the limit of the average velocity ∆x/∆t, taken over the time interval ∆t as the time interval tends to zero, is written as dx/dt. (This is called the derivative of x with respect to t and should be read as ‘dee x by dee t.’)
Using this piece of calculus notation we can sum up our discussion of instantaneous velocity in the following way:
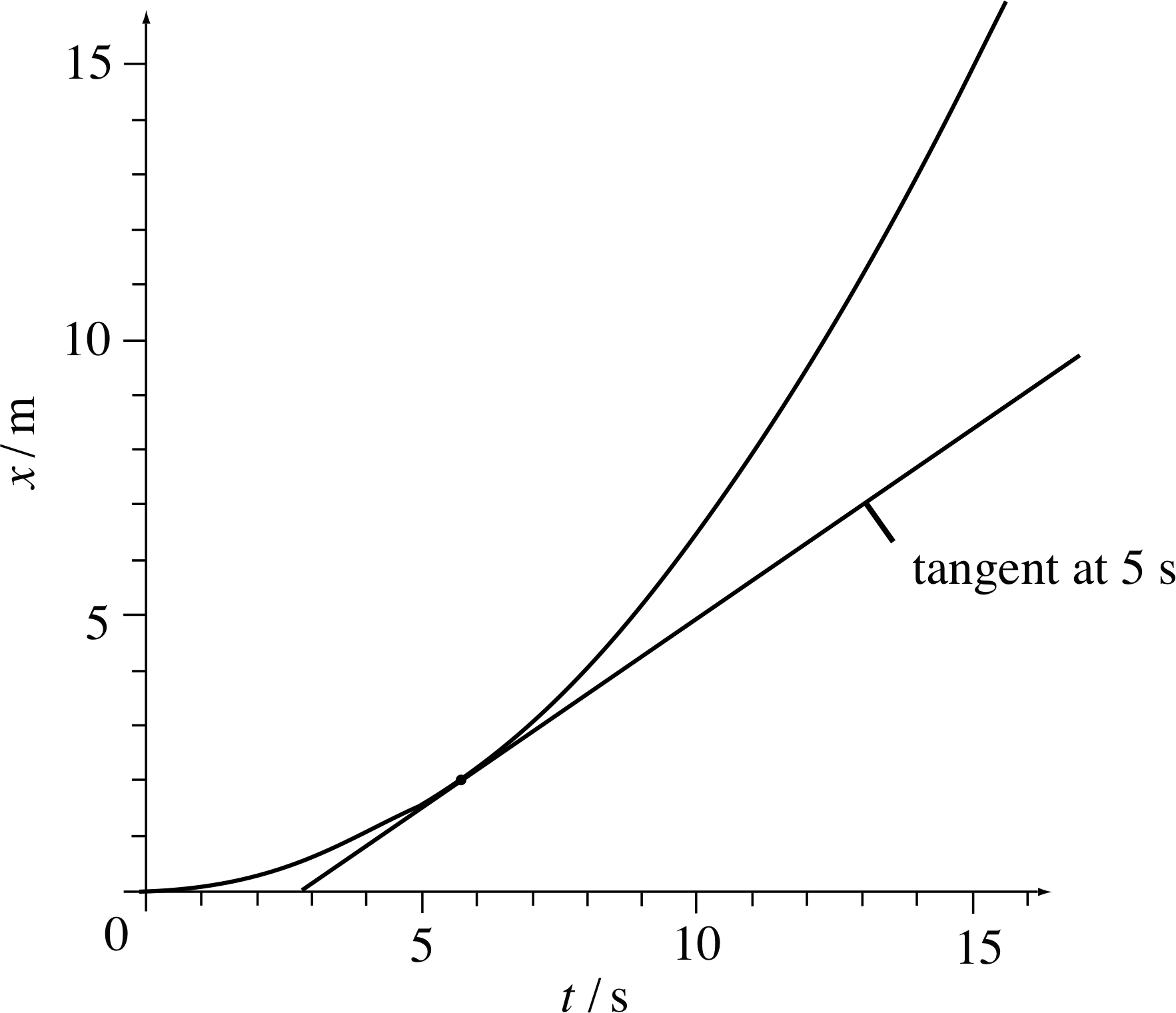
Figure 16 The instantaneous velocity of the car at time t = 5 s is the gradient of the tangent at the time, 5 s.
In linear motion, the instantaneous velocity υx at any particular time is given by the gradient of the tangent to the position–time graph at that time, i.e.
$\upsilon_x = \dfrac{dx}{dt}$
If you are already familiar with the techniques of calculus you will know that dx/dt is more than a convenient way of representing the gradient of the tangent to the graph of x against t. In particular, you will be aware that if we have an equation that allows us to work out the value of x that corresponds to any given value of t, i.e. if we know an equation that expresses x as a function of t, then we can work out the value of dx/dt at any time algebraically, without having to go to the trouble of plotting any graphs at all. However, whether you are familiar with calculus or not, it is vital to remember the graphical interpretation of dx/dt in terms of the gradient of a tangent – the following question should help you to do that.
| Position x/m | Time t/s |
|---|---|
| 0.00 | 0.00 |
| 0.10 | 0.05 |
| 0.20 | 0.20 |
| 0.30 | 0.44 |
| 0.40 | 0.78 |
| 0.50 | 1.24 |
| 0.60 | 1.75 |
| 0.70 | 2.40 |
| 0.80 | 3.15 |
Question T6
Table 2 shows position and time measurements for a ball falling from rest under gravity. Plot the points on a position–time graph. Determine the instantaneous velocity dx/dt at 0.20 s by drawing a tangent at 0.20 s and measuring its gradient. Repeat the procedure at 0.60 s. Compare these instantaneous velocities with the average velocities over the intervals from 0.10 to 0.30 s and 0.50 to 0.70 s.
Answer T6
Figure 22 shows the position–time graph for the data in Table 2 with the tangent lines drawn.
Gradient at $\rm 0.20\,s = \dfrac{(1.4-0)\,m}{(0.80-0.11)\,s} = \dfrac{1.4\,m}{0.69\,s} = 2.0\,m\,s^{-1}$
Gradient at $\rm 0.60\,s = \dfrac{(2.9-0)\,m}{(0.80 - 0.30)\,s} = \dfrac{2.9\,m}{0.50\,s} = 5.8\,m\,s^{-1}$
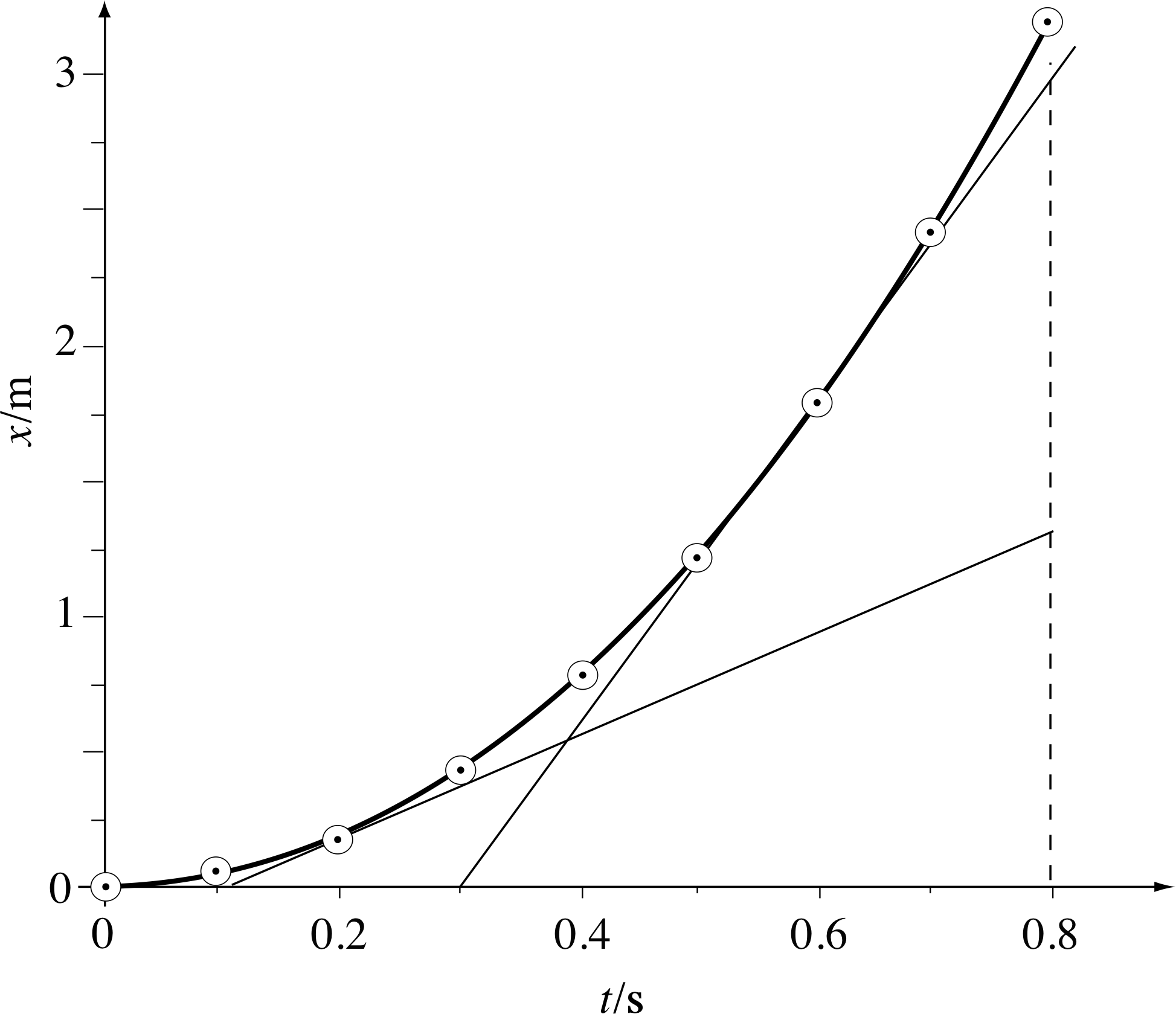
Figure 22 See Answer T6.
You may not necessarily have chosen the same time intervals for the gradient calculations, but your answers should be approximately the same as those above, given the limitations of the scale.
The average velocity between t = 0.10 s and 0.30 s can be obtained using Equation 5 and the data directly from Table 2
$\langle \upsilon_x \rangle = \dfrac{\Delta x}{\Delta t} = \dfrac{x_2-x_1}{t_2-t_1}$(Eqn 5)
$\langle \upsilon_x \rangle = \rm \dfrac{(0.44-0.05)\,m}{(0.30-0.10)\,s} = \dfrac{0.39\,m}{0.20\,s} = 2.0\,m\,s^{-1}$
and between t = 0.50 s and 0.70 s
$\langle \upsilon_x \rangle = \rm \dfrac{(2.40-1.24)\,m}{(0.70-0.50)\,s} = \dfrac{1.16\,m}{0.20\,s} = 5.8\,m\,s^{-1}$
We see that these average velocities are the same as our instantaneous velocities at t = 0.20 s and t = 0.60 s, to within the accuracy of our graph.
In Section 2 it was pointed out that position–time graphs are just a special class of displacement–time graphs. (Position is just displacement from the origin.) In view of this you may wonder what physical significance can be attached to dsx1/dt – the gradient of a tangent to a general displacement–time graph, in which the displacement sx may be measured from any specified point. The interpretation is in fact quite straightforward and of some significance. dsx1/dt represents the instantaneous velocity relative to the reference point from which the displacement is measured. If the reference point is stationary then dsx1/dt = dx/dt at any time and we learn nothing new. However, if the reference point is located on a moving body (such as the pedestrian in Figure 8) then dsx1/dt at any time will generally differ from dx/dt.
In this latter case in particular it is customary to refer to dsx1/dt at any moment as the (instantaneous) relative velocity. i For example, if at some moment the pedestrian in Figure 8 has an instantaneous velocity (dx1/dt) of 1 m s−1, while that of the car (dx2/dt) is 15 m s−1, the velocity of the car relative to the pedestrian (i.e. dsx1/dt) at that moment will be (15 − 1) m s−1 = 14 m s−1.
In linear motion, at any time, the instantaneous relative velocity of one body with respect to another is given by the gradient of the tangent to the displacement–time graph, dsx1/dt, at that time, where sx is the displacement from the first body to the second.
All velocities are really relative velocities. Just as a position x is a special kind of displacement sx, so an instantaneous velocity dx/dt is a special kind of instantaneous relative velocity dsx1/dt. So, if one day when out driving you are stopped by a policeman and asked ‘how fast do you think you were travelling?’ you would be quite justified in replying ‘relative to what?’ However, you would probably be most unwise to do so.
4 Acceleration
The previous section introduced a velocity that changed with time. The rate at which the velocity of a body changes with time is known as its acceleration. Since velocity is a vector quantity, the rate of change of velocity must also be a vector quantity, the specification of which requires both a magnitude and a direction. In three dimensions an acceleration is therefore usually denoted by a and expressed in terms of its three (scalar) components by an equation of the form
a = (ax, ay, az)
As usual we shall avoid dealing with this three–dimensional quantity by considering one–dimensional linear motion in which the acceleration is entirely specified by its scalar component ax along the x–axis. The component ax may be positive or negative. A positive value for ax corresponds to an increase in υx with time and a negative value for ax corresponds to a decrease in υx with time. Any acceleration that causes the speed to decrease is called a deceleration. In the case of linear motion the magnitude of the acceleration is the positive quantity given by
a = | ax |(6) i
✦ What would be appropriate SI units for the measurement of a or ax?
✧ Since acceleration is the rate of change of velocity, and since velocity is measured in m s−1, the appropriate units for a and ax are m s−2.
| Time from release t/s | Velocity of ball υx /m s−1 |
|---|---|
| 0.0 | 0.00 |
| 0.2 | 1.97 |
| 0.4 | 3.93 |
| 0.6 | 6.10 |
| 0.8 | 7.81 |
| 1.0 | 9.80 |
4.1 Constant acceleration
Table 3 shows the measured velocity of a falling ball at six different instants of time. Data of this kind can be used to plot a velocity–time graph.
Question T7
Use the data in Table 3 to plot a velocity–time graph for the falling ball. (Plot the time along the horizontal axis and the velocity along the vertical axis, and draw a smooth line through the points.)
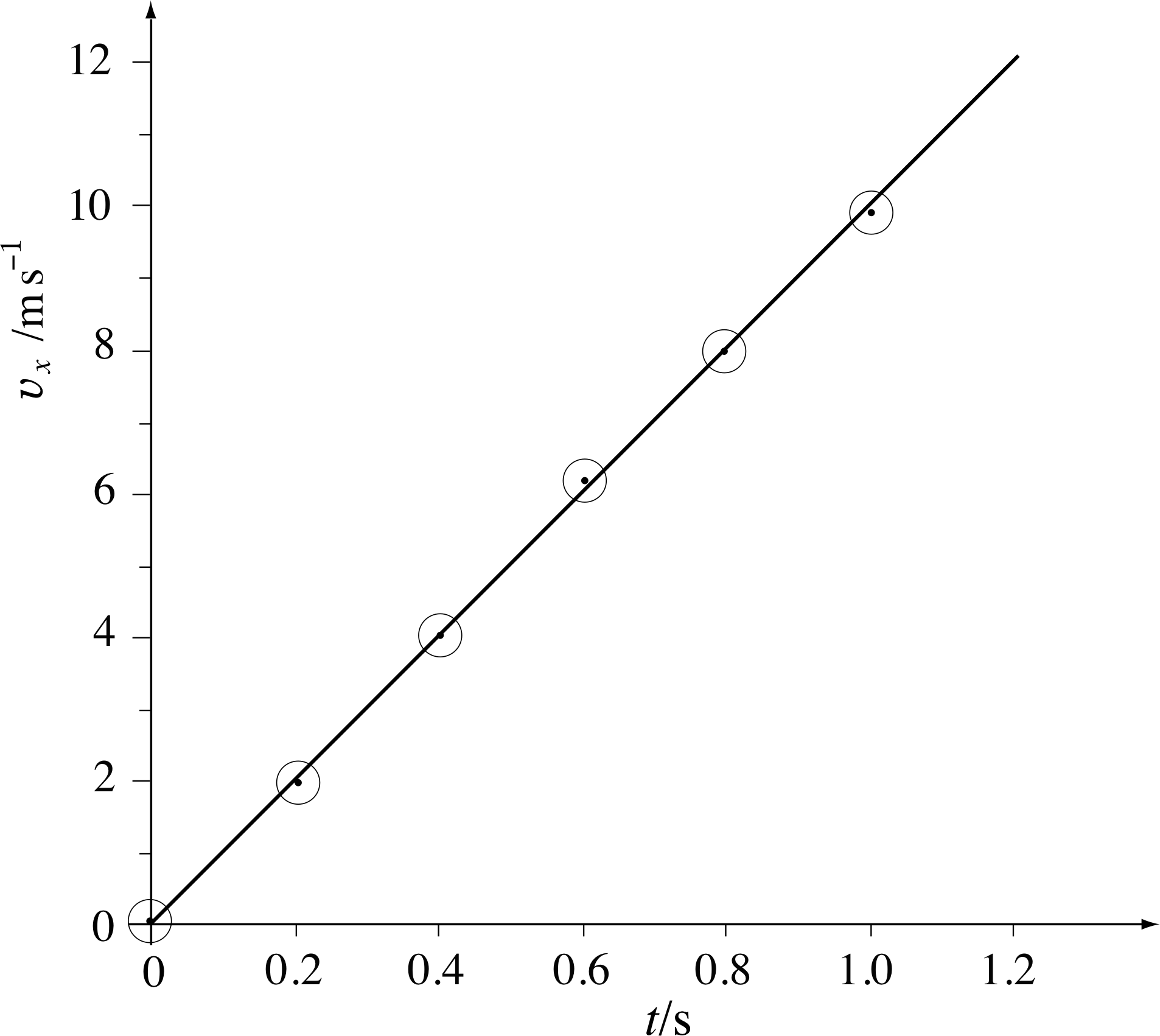
Figure 23 See Answer T7.
Answer T7
Your velocity–time graph should look like Figure 23.
You will have noticed that your graph is a straight line. Equal changes of velocity occur in equal time intervals, and this implies that the ball is falling with constant acceleration or uniform acceleration. In fact, this graph is an illustration of a well known experimental observation that, provided air resistance can be neglected, a body falling freely from rest near the Earth’s surface increases its velocity at a constant rate. The gradient of the line represents the rate of change of velocity, i.e. the acceleration.
Question T8
Measure the gradient of the line you have drawn in answer to Question T7.
Figure 23 See Answer T8.
Answer T8
If we take the interval between 0 s and 1.0 s the velocity increases from 0 m s−1 to 10 m s−2. Therefore the gradient is approximately 10 m s−2.
Measurements of the magnitude of the acceleration of any falling body near the Earth’s surface, in the absence of air resistance, give the value 9.8 m s−2 (to two significant figures). This quantity is known as the magnitude of the acceleration due to gravity at the Earth’s surface (or often simply as the acceleration of gravity) and is given the symbol g. i
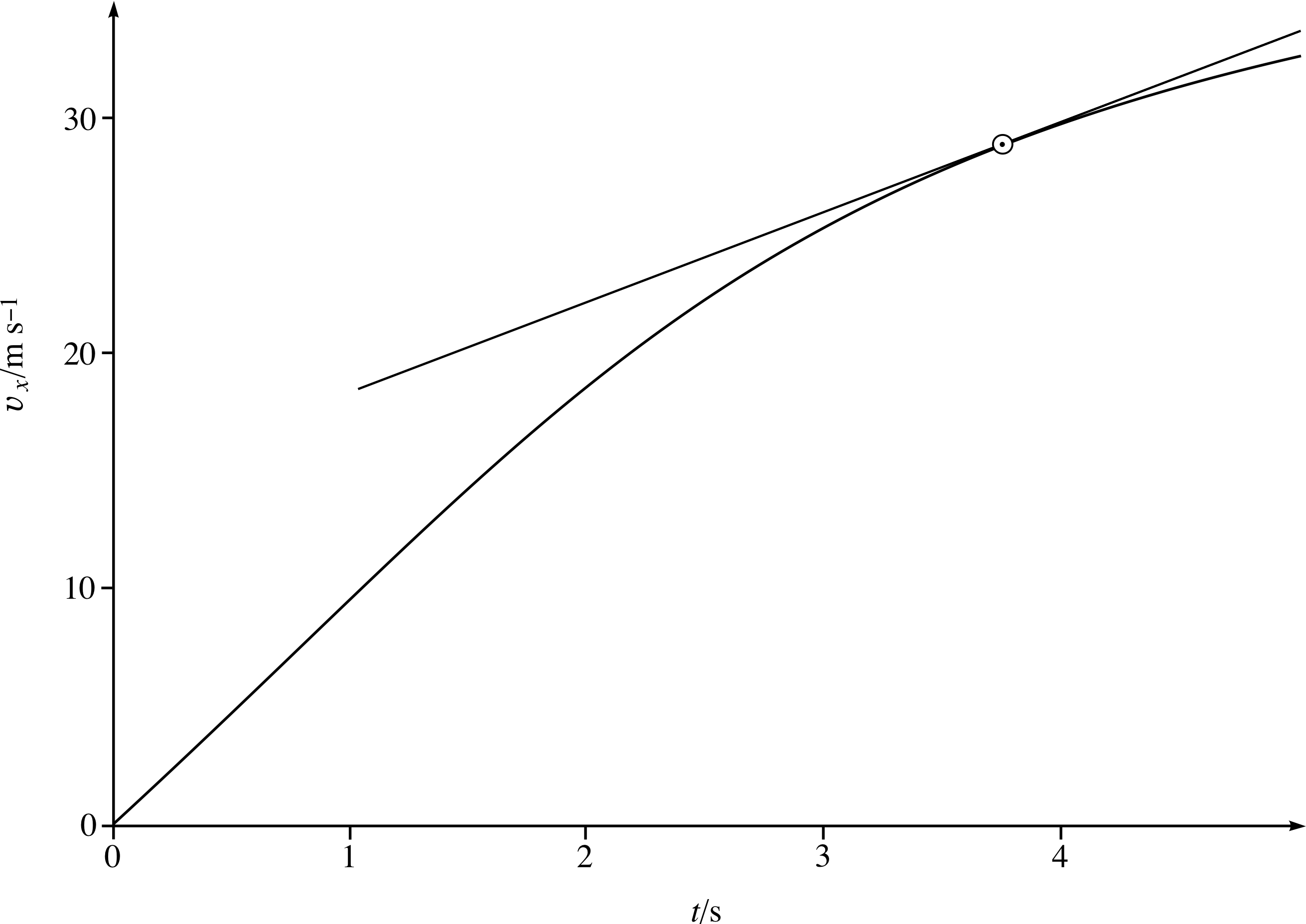
Figure 17 Velocity–time graph of a falling ball.
4.2 Average acceleration
Figure 17 is a velocity–time graph for the motion of the ball in Questions T7 and T8 over a much longer period of time. After a few seconds the graph becomes markedly curved, indicating that the acceleration is no longer constant. The velocity is still increasing, but at a slower rate. This illustrates the effect of air resistance, which becomes more significant as the velocity increases.
If we use Figure 17 we can calculate the average acceleration over a chosen period of time by means of the method we applied to the calculation of average velocity in the previous section. This leads to the following equation:
$\langle a_x \rangle = \dfrac{\Delta \upsilon_x}{\Delta t} = \dfrac{\upsilon_{x2}-\upsilon_{x1}}{t_2-t_1}$(7) i
where∆υx = υx2 − υx1 is the change in υx over the interval ∆t = t2 − t1.
4.3 Instantaneous acceleration i
In many cases we wish to know the instantaneous acceleration of a moving body, that is the acceleration at a specific time. In Subsection 3.3 we defined an instantaneous velocity in terms of the limit of the average velocity as the time interval shrank to zero. We may use the same ideas now to calculate the instantaneous acceleration. Therefore we can write the following.
In linear motion, the instantaneous acceleration ax at any particular time is the limit of the average acceleration as the time interval around that particular time is made smaller and smaller, i.e.
$\displaystyle a_x = \lim_{\Delta t\rightarrow 0} \dfrac{\Delta \upsilon_x}{\Delta t}$
We also saw in Subsection 3.3 that calculus provides a useful shorthand for limits of this kind and that at any particular time such a limit may be interpreted graphically as the gradient of the tangent to an appropriate graph at that particular time. In the present case we are dealing with a velocity–time graph, so the piece of calculus notation we need is dυx1/dt, the derivative of υx with respect to t. Using this we can say:
In linear motion, the instantaneous acceleration ax at any particular time is given by the gradient of the tangent to the velocity–time graph at that time, i.e.
$\upsilon_x = \dfrac{d\upsilon_x}{dt}$
✦ What is the instantaneous acceleration at the point indicated in Figure 17, when the time is 3.75 s? i
✧ The gradient of the tangent (and hence the acceleration) at t = 3.5 s is 3.9 m s−2. The average acceleration, using Equation 7 with the data taken from the graph, 0.25 s either side of 3.75 s, is (30−28) m s−1/0.50 s = 3.9 m s−2.
Compare this with the average acceleration between t = 3.5 s and 4.0 s.
The acceleration you have just found is considerably less than g, because of the effects of air resistance.
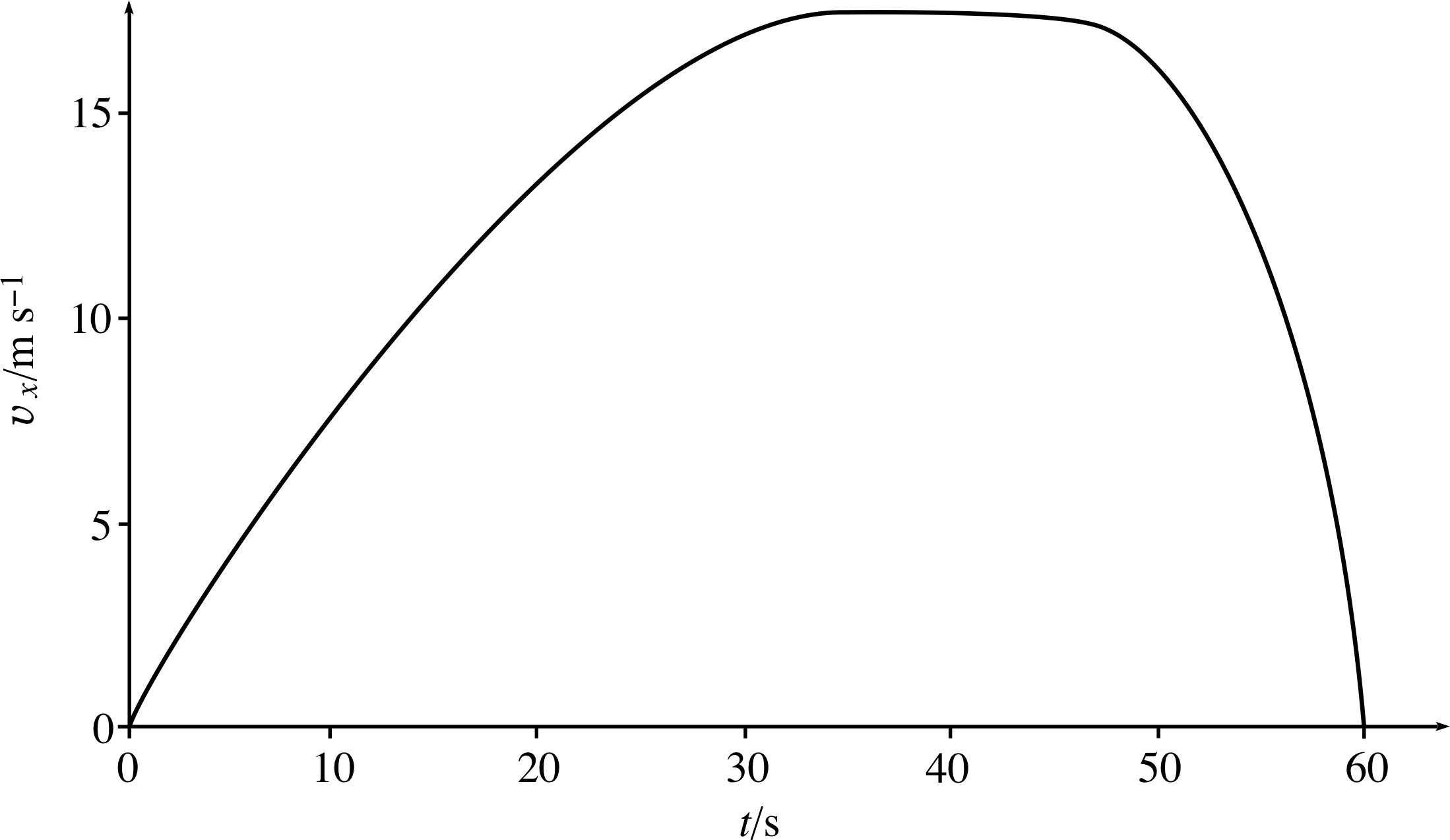
Figure 18 See Question T9.
Question T9
Figure 18 shows the velocity–time graph of a car during a short journey along a straight road. Determine the acceleration dυx1/dt at 10 s, 40 s and 55 s, and then use this information to help you to describe the journey in everyday language.
Answer T9
From measurements on the tangents to the curve at the three times the three gradients are approximately 0.66 m s−1, 0 m s−2, −1.3 m s−2, respectively. These are therefore the values of the accelerations at these times.
The journey can be described as follows. The car accelerates from rest to a steady velocity of 17.5 m s−1 in about 34 s. It remains at that velocity for about 10 s and then decelerates to rest in about 15 s, with the deceleration increasing as the velocity is reduced to zero – this looks like an emergency stop!
5 Equations of motion
In previous sections we have seen how the motion of an object such as a car or a ball, can be described and analysed graphically. However, drawing graphs is time consuming and may be inaccurate, so it is highly desirable that methods should be developed for describing and analysing motion algebraically (in terms of equations), without the need for graphs. Such methods certainly exist and are explained in some detail in various FLAP modules. The aim of this section is simply to introduce you to such algebraic descriptions in a way that will be clearly related to the graphical descriptions you have already seen. In order to keep the discussion as simple as possible we not only restrict ourselves to motion in one dimension but we further restrict our considerations to moving objects that are sufficiently small and simple that they can be treated as ideal point–like particles. Such ideal particles have mass and occupy a definite position at any time, but unlike real objects (such as cars or balls) they cannot rotate, bend or vibrate. Their simplicity makes them ideal subjects for our considerations, and, as it turns out, an excellent starting point from which to consider more realistic objects in other modules.
We will now use the ideas developed in previous sections to derive equations that describe the motion of a particle travelling either with constant velocity or with constant acceleration. We will not concern ourselves here with the more general case of non–uniform acceleration.
5.1 Uniform motion equations
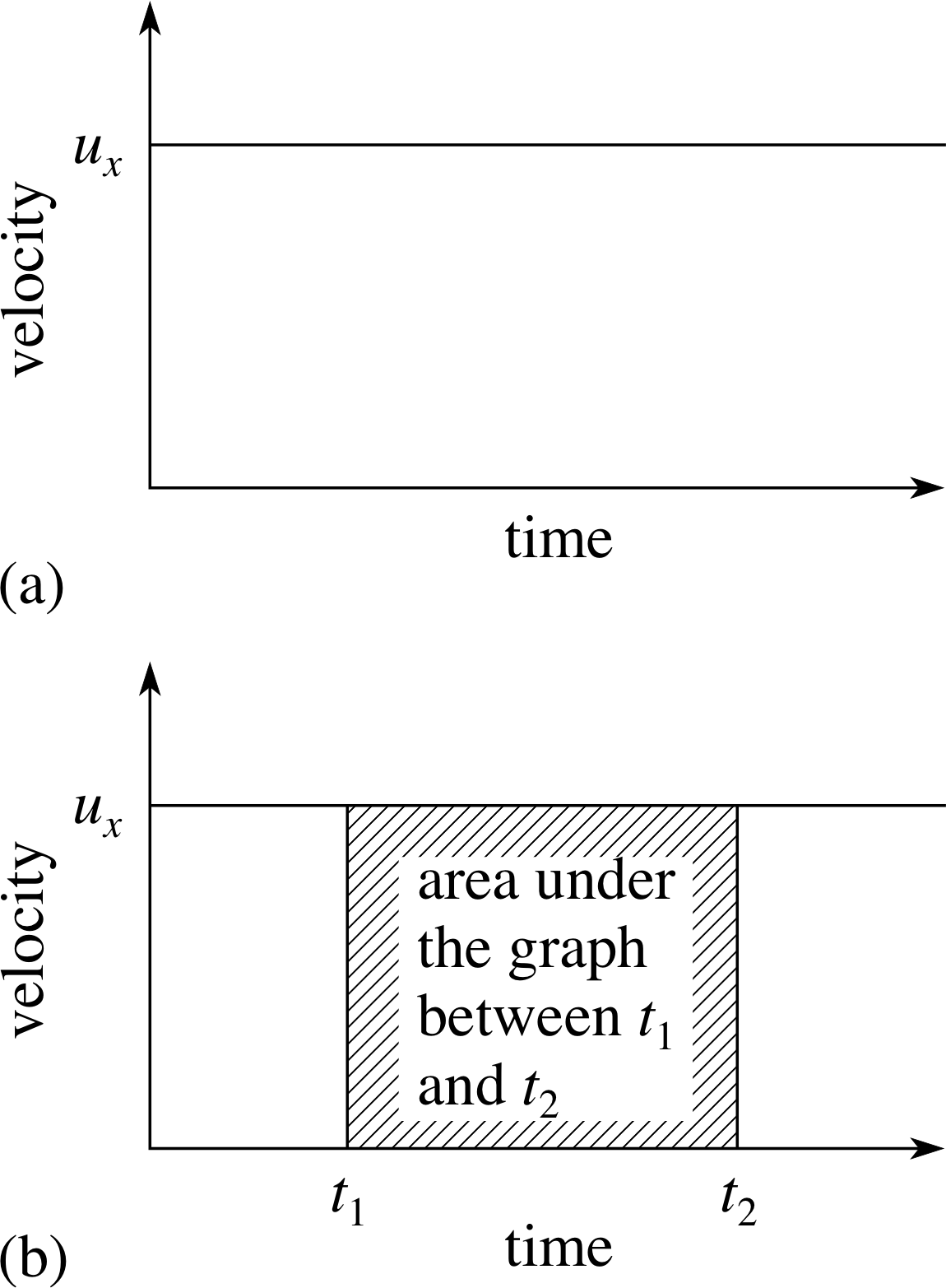
Figure 19 (a) Velocity–time graph of a particle moving with a constant velocity ux. (b) The area under the velocity–time graph between t1 and t2. Note that if the velocity ux is negative then the area ‘under’ the graph is also counted as negative.
Uniform motion (i.e. constant velocity motion) is the simplest kind of motion. It was treated graphically in Subsection 3.1. In this subsection we are going to consider uniform motion algebraically, but our viewpoint will be slightly different from that which we adopted earlier. The main difference is that the present treatment will concentrate on the changing displacement of the particle from some physically defined reference point rather than the changing position of the particle relative to an arbitrarily chosen origin. More specifically, we shall take the position of the particle itself at time t = 0 to be the fixed reference point from which the displacement sx is measured and we shall let ux represent the constant velocity of the particle relative to that reference point. As a consequence of this choice of reference point we can be sure that sx = 0 at t = 0. Moreover, since the velocity is uniform in this case we can equate ux with the rate of change of displacement over any part of the motion. Thus:
$\dfrac{\Delta s_x}{\Delta t} = \dfrac{s_x - 0}{t - 0} = \dfrac{s_x}{t}$
i.e.sx = uxt(8)
Remember, this applies only if
υx = ux = constant(9)
which also has the consequence
ax = 0(10)
Equations 8, 9 and 10 are the uniform motion equations. They make it possible to work out the displacement from the initial position, the velocity and the acceleration of the particle at any time.
Figure 19a shows uniform motion on a velocity–time graph. This is a very simple graph, nonetheless it illustrates a significant (and easily generalizable) result concerning the area under the graph between two given times (see Figure 19b). i
Question T10
Use the uniform motion equations to confirm this claim by writing down an expression for the area under the graph between t1 and t2, and then relating that area to the change in displacement over the same interval.
Answer T10
Between t1 and t2 the area under the graph is
ux × (t2 − t1) = uxt2 − uxt1
but, if sx1 is the displacement at time t1and sx2 is the displacement at time t2, it follows from Equation 8,
sx = uxt(Eqn 8)
that uxt2 − uxt1 = sx2 − sx1
and the right–hand side of this equation is just the change in displacement, as claimed.
For uniform motion, the area under the velocity–time graph, between any two times t1 and t2, is equal to the change in the displacement over that interval.
Although somewhat out of context, it is worth noting at this point that the relationship, that has just been uncovered between the area under a velocity–time graph and the change in displacement, indicates a more general result that applies even when the particle is accelerating and the area under the graph is not rectangular.
In linear motion, the area under a velocity–time graph, between two times t1 and t2, is always equal to the change in displacement between those times.
5.2 Uniform acceleration equations
Inspired by our success in dealing algebraically with uniform motion let us now move on to a slightly more difficult case, that of a particle moving with constant or uniform acceleration. Suppose such a particle has a velocity ux at the start of its motion when t = 0, and a velocity υx at some later time t. These two velocities are known, respectively, as the initial velocity and the final velocity. If we recall the definition of average acceleration $\langle a_x\rangle$ given in Equation 7, we can write the constant acceleration ax in terms of these symbols as
$a_x = \dfrac{\upsilon_x-u_x}{t}$
which can be rearranged to give
υx = ux + axt(11)
This is the first of the three uniform acceleration equations (also known as the constant acceleration equations).
When using the uniform acceleration equations, it is generally a good idea to state clearly:
- the reference point from which displacements are to be measured;
- the direction in which displacements are positive;
- the given data, expressed in terms of the symbols to be used, e.g. ax, ux, υx, t.
It is generally a bad idea to change any of these during a solution.
Question T11
A racing car moves from rest with a uniform acceleration of 9.0 m s−2 for the first 5 s. Calculate the velocity of the car after 2.5 s, and then find the time taken for the car to increase its speed from 30 m s−1 to 40 m s−1.
Answer T11
For the first part of the question ux = 0 m s−1 and ax = 9.0 m s−2. From Equation 11,
υx = ux + a2t(Eqn 11)
υx = ms−1 + (9. ms−2 × 2.5s) = 22.5 m s−1
This gives a final velocity of 23 m s−1 to two significant figures.
For the second part, ux = 30 m s−1 and υx = 40 m s−2. To find t, rearrange Equation 11 to get
$t = \dfrac{\upsilon_x-u_x}{a_x} = \rm \dfrac{(40-30)\,m\,s^{-1}}{9.0\,m\,s{-2}} = 1.1\,s$
You have probably seen advertisements for cars stating that they can accelerate from rest to 60 mph in, say, 8 s. Suppose you want to work out how far the car would travel in that time, assuming that the acceleration is uniform. You could do this if you knew the average speed of the car.
✦ What is the average speed of the car over the interval?
✧ The average speed is half the sum of the initial and final speeds i, i.e. [(0 + 60)/2] mph or 30 mph. You met this idea in Question T10.
✦ What is the distance travelled over the interval?
✧ The distance travelled is found by multiplying this average speed of 30 mph by the time taken, which is 8 s (or 8/3600 h). The car thus travels (30 × 8/3600) miles, i.e. 0.067 miles.
For our uniformly accelerated particle we can calculate the displacement sx after a time t in this same way once we have an expression for the average velocity. We will measure the displacement from the initial position of the particle when the time is zero (so the initial displacement is zero) and calculate the final displacement at time t by multiplying the average velocity by t.
✦ What is the expression for the average velocity in this case?
✧ If the initial velocity is ux and final velocity is υx then the average velocity is (ux + υx)/2.
Thus$s_x = \dfrac{u_x+\upsilon_x}{2}t$(12) i
Substitution of the expression for υx from Equation 11,
υx = ux + axt(Eqn 11)
gives
$s_x = \dfrac{u_x + u_x+a_x t}{2}t = \dfrac{2u_x t + a_xt^2}{2}$
and hence our second uniform acceleration equation is
sx = uxt + ½ axt2(13)
Try using this equation in the next question.
Question T12
A stone falls from rest with an acceleration of 9.8 m s−2. Calculate how far it has fallen after 2.0 s.
Answer T12
Given that ux = 0 m s−1, ax = 9.8 m s−2 and t = 2.0 s, if we use Equation 12,
$s_x = \dfrac{u_x+\upsilon_x}{2}$(Eqn 12)
we find
$s_x = \dfrac12 \left[9.8\,m\,s{-2}\times(2.0\,s)^2\right] = 19.6\,m$
So after 2.0 s the stone will have fallen a distance | sx | = 20 m, to two significant figures.
Aside The next question is more difficult because it requires you to use both of the uniform acceleration equations derived so far (Equations 11 and 13), in order to eliminate the time t, which is not given in the question.
Question T13
Calculate how fast the stone in Question T12 is moving after it has fallen through 2.0 m.
Answer T13
Given that sx = 2.0 m, ax = g = 9.8 m s−1 and ux = 0 m s−2, if we use Equation 11 to relate υx to t
υx = ux + axt(Eqn 11)
we findυx = 0 m s−1 + gt
i.e.t = υx /g
We do not know the time, t, but Equation 13,
sx = uxt + ½ axt2(Eqn 13)
also involves t. If we substitute the above values into Equation 13 we find
2.0 m = 0 m + ½ gt2
If we then substitute for t we get
$2.0\,{\rm m} = \dfrac12 g\left(\dfrac{\upsilon_x}{g}\right)^2 = \dfrac12 g\dfrac{\upsilon_x^2}{g^2} = \dfrac{\upsilon_x^2}{2g}$
soυx2 = 4.0 m × g = 39.2 m2s−2
Taking the positive square root gives υx = 6.26 m s−2.
Therefore the stone’s final velocity is 6.3 m s−1, to two significant figures.
In answering Question T13 an expression was found for the time at the end of the interval, even though the question did not ask for it. We could have avoided this extra effort if we had an equation which gave the final velocity directly in terms of the acceleration and displacement, the quantities which were given in the question. To derive such an equation we can follow the same route that was used in Question T13, but this time use algebra to derive a general expression for the time t. We can obtain this expression by rearranging Equation 11.
Thus
$t = \dfrac{\upsilon_x-u_x}{a_x}$
From Equation 12, the displacement is the average velocity multiplied by this time;
so$s_x = \dfrac{u_x+\upsilon_x}{2}t$(Eqn 12)
and on substitution for t this gives
$s_x = \dfrac{\upsilon_x^2-u_x^2}{2 a_x}$
This may be rearranged to give the third uniform acceleration equation
υx2 = ux2 + 2axsx(14)
Question T14
A car is travelling at an initial velocity of 6.0 m s−1. It then accelerates at 3.0 m s−2 over a distance of 20 m. Calculate its final velocity.
Answer T14
Given that ux = 6.0 m s−1, ax = 3.0 m s−2 and sx = 20 m, the final velocity, υx, can be found from Equation 14,
υx2 = ux2 + 2axsx(Eqn 14)
υx2 = (6.0 m s−1)2 + (2 × 3.0 m s−2 × 20 m) = 156 m2s−2
Taking the positive square root gives υx = 12.5 m s−1.
The car’s final velocity is therefore 13 m s−1, to two significant figures.
Finally, it’s important to remember that all the equations derived in this subsection apply to situations in which
ax = constant(15)
Do not make the common mistake of supposing them to work in more general situations.
5.3 Solution to the introductory problem
We will return now to the problem posed in Subsection 1.1. At this point in the module you should be able to solve this problem. Reread the problem and then consider how you would tackle it.
According to the Highway Code, a car travelling along a straight road at 30 mph (i.e. about 13.3 m s−1, read as 13.3 metres per second) can stop within 23 metres of the point at which the driver sees a hazard. This is known as the stopping distance. If the driver always takes 0.70 s to react to a hazard and apply the brakes, what is the stopping distance at 70 mph (i.e. about 31.1 m s−1) assuming the same deceleration as at 30 mph?
When you have done this, have a look at the solution given below.
We can divide the motion of the car into two stages. During the first stage, corresponding to the driver’s reaction time, the car is travelling at a constant velocity. The second stage starts when the brakes are applied and we shall assume the car then has a constant deceleration. The question does not tell us the value of this constant deceleration but since it is constant and therefore doesn’t depend on the velocity of the car we can work it out from the information we are given about the stopping distance of the car travelling at 30 mph (13.3 m s−1).
Within each stage of the motion, displacements will be measured from the position of the car at the beginning of that stage. The direction of motion will always be the positive direction for displacements, so all velocities will be positive and deceleration will be a constant negative acceleration in this case.
For the car travelling at 13.3 m s−1, during the first stage of its motion
υx = ux = constant = 13.3 m s−1 and t = 0.70 s.
To find the displacement at the end of this constant velocity stage we can use
sx = uxt(Eqn 8)
sosx = 13.3 m s−1 × 0.70 s = 9.31 m
Therefore the distance covered by the end of the reaction time is s = | sx | = 9.31 m. Since the stopping distance at 13.3 m s−1 is 23.0 m, the distance covered in the second stage must be (23.0 − 9.31) m = 13.7 m.
For the second stage, while the driver is braking, we thus have
ux = 13.3 m s−1, υx = 0 m s−1 and sx = 13.7 m (from the new origin)
To find ax during this constant acceleration stage we can use
υx2 = ux2 + 2axsx(Eqn 14)
so$a_x = \dfrac{\upsilon_x^2-u_x^2}{2 s_x} = \rm \dfrac{(0−13.3^2)\,m^2\,s^{-2}}{2 \times 13.7\,m} = -6.46\,m\,s^{-2}$
Now that the acceleration is known, we can apply it to the situation in which the car is travelling at 31.1 m s−1. For the first stage of that motion
υx = ux = constant = 31.1 m s−1 and t = 0.70 s
If we use the constant velocity equation sx = uxt we see that
sx = (31.1 × 0.70) m = 21.8 m
For the second stage, while the driver is breaking
ux = 31.1 m s−1, υx = 0 m s−1 and ax = −6.46 m s−2
If we use the constant acceleration equation υx2 = ux2 + 2axsx we see that
$s_x = \dfrac{\upsilon_x^2-u_x^2}{2 a_x} = \rm \dfrac{(0−31.1^2)\,m^2\,s^{-2}}{2\times -6.46\,m\,s^{-2}} = 74.9\,m$
The stopping distance of the car at 31.1 m s−1 is the sum of the magnitudes of the displacements in the two stages, so
stopping distance = (21.8 + 74.9) m = 96.7 m
This shows that the stopping distance at 70 mph is more than four times that at 30 mph, which reinforces the need to drive at a safe distance from the car in front.
6 Closing items
6.1 Module summary
- 1
-
Space is three-dimensional, so three position coordinates (x, y and z) are required to locate any point in space relative to the origin of a Cartesian coordinate system.
- 2
-
A vector has both magnitude and direction, and may be contrasted with a scalar which has no direction. Vectors are often specified in terms of their components; these are scalar quantities that may be positive or negative and which are measured along the axes of the coordinate system. Vector quantities include position vector r = (x, y, z), displacement s = (sx, sy, sz1), velocity υ = (υx, υy, υz) and acceleration a = (ax, ay, az1).
- 3
-
The magnitude of a vector is the ‘length’ or ‘size’ of that vector. | r |, the magnitude of the position vector r of a point, represents the distance from the origin of the coordinate system to that point. Magnitudes can never be negative.
- 4
-
The displacement s from one point to another describes the difference in their positions. | s | is the distance between those two points.
- 5
-
The velocity υ of a particle is the rate of change of the position vector of that particle; it tells us how fast the particle is moving and in what direction. | υ | is called the speed of the particle.
- 6
-
The acceleration a of a particle is the rate of change of the velocity of that particle.
- 7
-
Linear motion is motion along a straight line, though not necessarily in one direction along this line. Such motion is one–dimensional since the position of the moving particle can be described in terms of a single position coordinate, x.
- 8
-
The linear motion of a particle can be represented on a position–time graph, a displacement–time graph, or a velocity–time graph. The position–time graph shows the displacement from the origin at any time, while the displacement–time graph shows the displacement from some general reference point that may itself be in motion or it may be the particle’s position at t = 0.
- 9
-
If the position–time graph of a moving particle is linear, that particle must be moving with Subsection 3.1constant (uniform) velocity, i.e. with Subsection 3.1constant (uniform) speed and in a fixed direction.
- 10
-
In linear motion, the Subsection 3.2average velocity $\langle\upsilon_x\rangle$ over a specified time interval is
$\langle\upsilon_x\rangle = \dfrac{\Delta x}{\Delta t}= \dfrac{x_2-x_1}{t_2-t_1}$(Eqn 5)
- 11
-
In linear motion, the Subsection 3.3instantaneous velocity υx at any particular time is the limit of the average velocity as the time interval around that particular time is made smaller and smaller. This may be written more compactly in terms of the derivative of x with respect to t, dx/dt, which may be interpreted graphically as the gradient of the tangent to the position–time graph at the time in question. Thus,
$\displaystyle \upsilon_x = \lim_{\Delta t\rightarrow 0} \dfrac{\Delta x}{\Delta t} = \dfrac{dx}{dt}$
- 12
-
In linear motion, at any time, the instantaneous relative velocity of one body relative to another is given by the gradient of the tangent to the displacement–time graph dsx /dt at that time, where sx is the displacement from the first body to the second.
- 13
-
If the velocity–time graph of a moving particle is linear that particle must be moving with Subsection 4.1constant (uniform) acceleration.
- 14
-
In linear motion, the average acceleration $\langle a_x\rangle$ over a specified interval is
$\langle a_x\rangle = \dfrac{\Delta v_x}{\Delta t} = \dfrac{\upsilon_{x2}-\upsilon_{x1}}{t_2-t_1}$(Eqn 7)
- 15
-
In linear motion, the instantaneous acceleration ax at a particular time is the limit of the average acceleration as the time interval around that particular time is made smaller and smaller. This may be written more compactly in terms of the derivative of υx with respect to t, dυx1/dt, which may be interpreted graphically as the gradient of the tangent to the velocity–time graph at the time in question. Thus,
$\displaystyle a_x = \lim_{\Delta t\rightarrow 0} \dfrac{\Delta \upsilon_x}{\Delta t} = \dfrac{d\upsilon_x}{dt}$
- 16
-
When υx = ux = constant, the uniform (linear) motion of a particle can be described algebraically using the uniform motion equations:
sx = uxt(Eqn 8)
υx = ux = constant(Eqn 9)
ax = 0(Eqn 10)
- 17
-
When ax = constant the uniformly accelerated (linear) motion of a particle can be described algebraically using the uniform acceleration equations:
υx = ux + axt(Eqn 11)
sx = uxt + ½ axt2(Eqn 13)
υx2 = ux2 + 2axsx(Eqn 14)
- 18
-
The area under a velocity–time graph, between two times t1 and t2 is equal to the change in displacement between those times.
6.2 Achievements
Having completed this module, you should be able to:
- A1
-
Define the terms that are emboldened and flagged in the margins of the module.
- A2
-
Plot position-time, displacement–time and velocity–time graphs from linear motion data.
- A3
-
Describe the linear motion of a body, given its position-time, displacement–time or velocity–time graph, or, conversely, sketch such graphs given a description of the linear motion of the body.
- A4
-
Calculate the average velocity, or instantaneous velocity, or instantaneous relative velocity, as appropriate, from a position–time or displacement–time graph.
- A5
-
Calculate the average acceleration, or instantaneous acceleration, as appropriate, from a velocity–time graph.
- A6
-
Calculate the change in displacement of a particle over a given interval of time from its velocity–time graph.
- A7
-
Derive the uniform motion and constant acceleration equations and use them to solve problems.
Study comment You may now wish to take the following Exit test for this module which tests these Achievements.
If you prefer to study the module further before taking this test then return to the topModule contents to review some of the topics.
6.3 Exit test
Study comment Having completed this module, you should be able to answer the following questions each of which tests one or more of the Achievements.
| Time t/s | Velocity υx /m s−1 |
|---|---|
| 0 | 0 |
| 2 | 5.0 |
| 4 | 10.0 |
| 6 | 14.0 |
| 8 | 12.0 |
| 12 | 8.0 |
| 17 | 4.0 |
| 24 | 2.0 |
| 30 | 1.0 |
Question E1 (A2, A4, A5 and A6)
Plot a velocity–time graph from the data given in Table 4. From the graph determine: (a) the displacement from the initial position after 30 s, (b) the velocity at t = 10 s, and (c) the average acceleration between t = 10 s and t = 20 s.
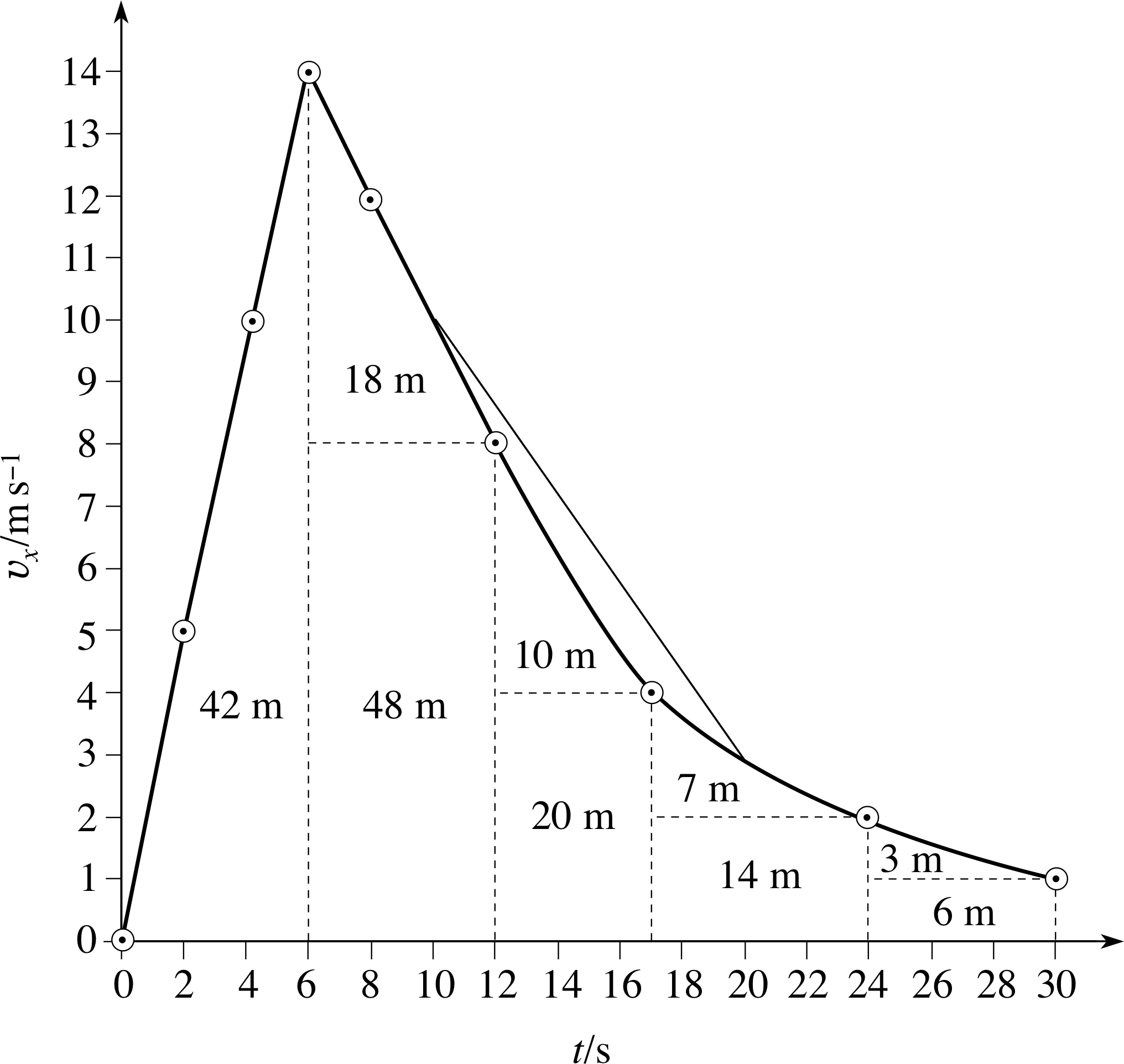
Figure 24 See Answer E1.
Answer E1
The velocity–time graph is illustrated in Figure 24. You may well have drawn a smooth curve through the data. The question does not make clear whether this is appropriate or not.
(a) The total displacement over the interval is given by the area under the velocity–time graph. This is rather difficult to determine exactly, but a good approximation is to divide the area under the graph into the nine regions shown, and to treat each one as a triangle or a rectangle as appropriate. The displacement is then seen to be approximately 168 m.
(b) The velocity at t = 10 s is 10.0 m s−1.
(c) According to Equation 7, the average acceleration between t = 10 s and t = 20 s is given by the gradient of the line joining the two points on the graph that correspond to t = 10 s and t = 20 s. So,
$\displaystyle \langle a_x \rangle = \frac{(3.0-10.0)\,\rm{m\,s^{-1}}}{(20-10)\,\rm{s}} = -0.70\,\rm{m\,s^{-2}}$
(If you had any difficulty with part (a), reread Subsection 5.1. Subsection 4.2 is relevant to the answer for part (c).)
Question E2 (A2 and A7)
A stone is released from rest and falls with uniform acceleration under gravity. Calculate its displacement from its initial position over the first 3 s at 0.5 s intervals. For ease of calculation the magnitude of the acceleration due to gravity may be taken to be 10 m s−2. Use your results to plot a displacement–time graph.
If the stone were released from the top of a cliff and hit the ground at the base of the cliff 2.8 s after it was dropped, what is the height of the cliff?
Answer E2
The displacements of the stone can be calculated using Equation 13,
sx = uxt + ½ axt2(Eqn 13)
with ux = 0 m s−1 and ax = 10 m s−2.
For t = 0.50 s sx = 0 m + 12 [10 m s−2 × (0.5 s)2] = 1.25 m
The displacement after 0.5 s is therefore 1.3 m, to two significant figures.
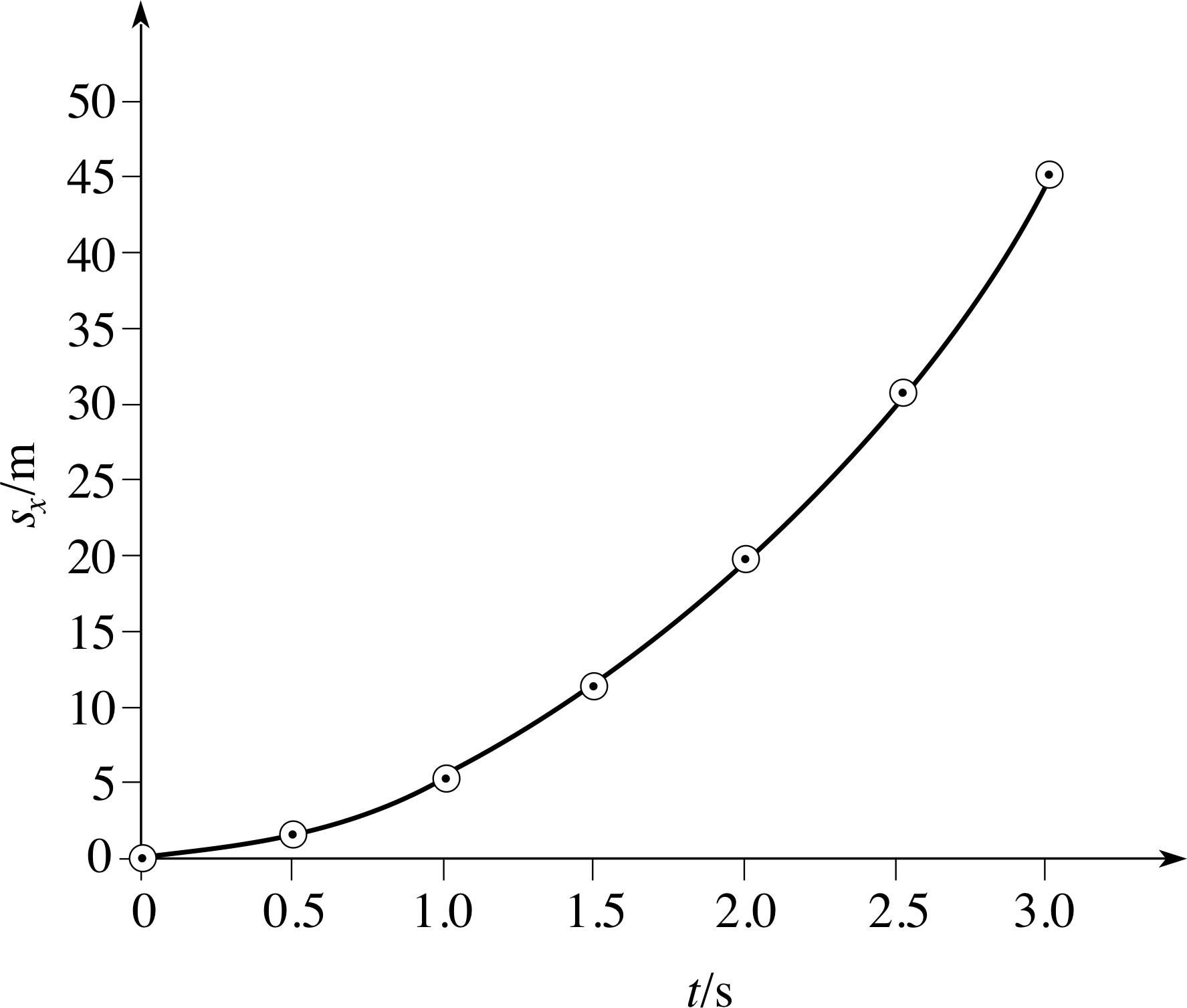
Figure 25 See Answer E2.
| t/s | sx /m |
|---|---|
| 0 | 0 |
| 0.5 | 1.3 |
| 1.0 | 5.0 |
| 1.5 | 11 |
| 2.0 | 20 |
| 2.5 | 31 |
| 3.0 | 45 |
The other displacements may be calculated in the same way, and are given in Table 5. The displacement–time graph is shown in Figure 25.
If the stone hits the ground 2.8 s after it is dropped, the height of the cliff may be found by reading from the graph the displacement when t = 2.8 s. Thus the cliff is 39 m high.
Alternatively, you can find the height algebraically using Equation 13.
(If you had any difficulty with this question, Subsection 2.3 deals with displacement–time graphs and Subsection 5.2 covers the use of constant acceleration equations.)
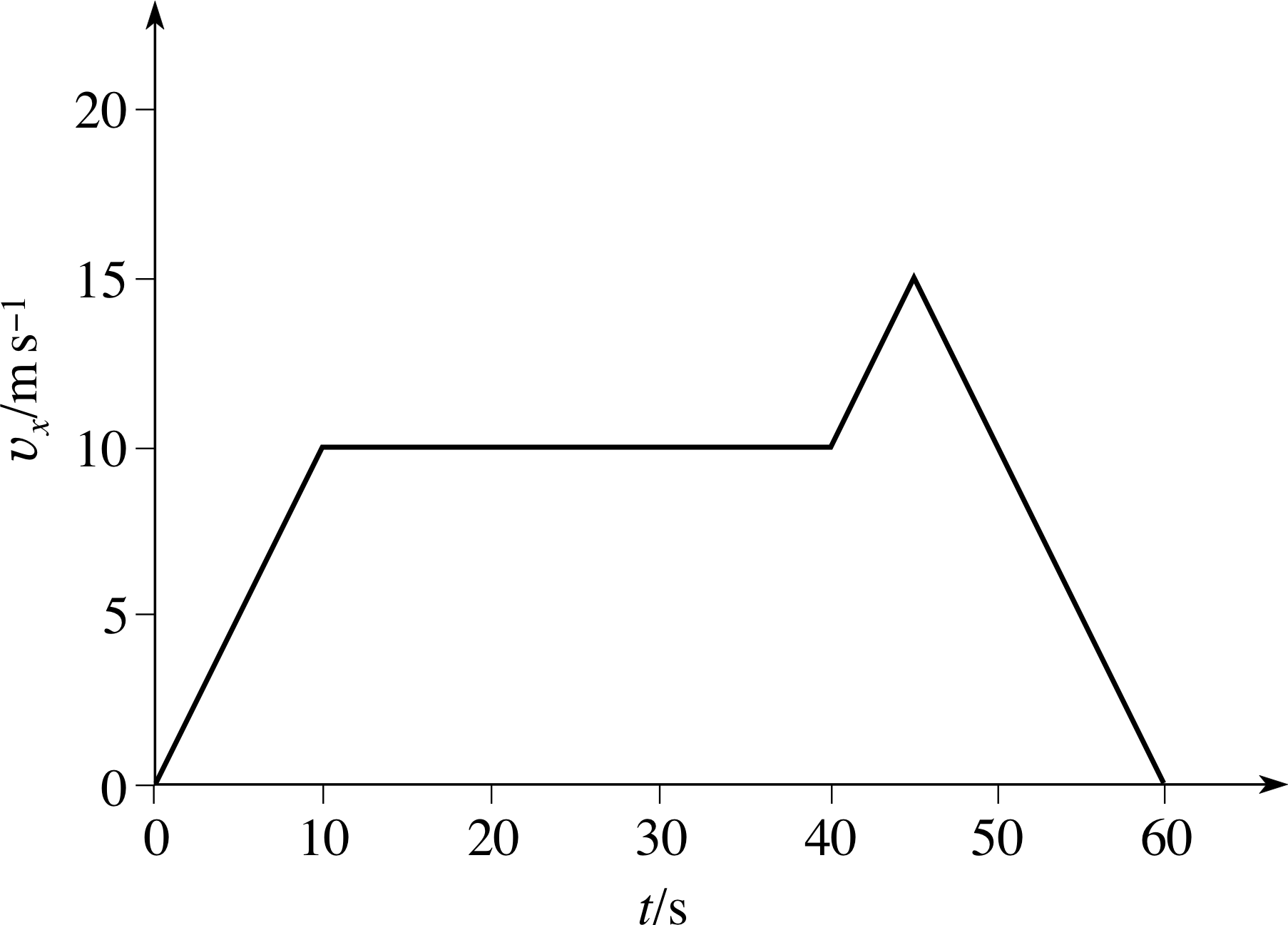
Figure 20 See Question E3.
Question E3 (A3)
Write a description of the motion of a body, illustrated by the velocity–time graph in Figure 20. (You are not required to calculate displacements.)
Answer E3
The body is initially at rest. There is an initial acceleration of 1 m s−2 for 10 s, after which time the velocity is 10 m s−1. This velocity is maintained for another 30 s, then there is an acceleration of 1 m s−2 for 5 s. Finally, there is an acceleration of −1 m s−2 for the last 15 s of the motion, with the result that at a time of 60 s from the start of the motion the velocity is again 0 m s−1, which means that the body is again at rest.
(If you had any difficulty with this question, reread Subsections 4.1 and 4.2.)
Question E4 (A7)
(a) Derive an equation relating initial velocity, final velocity, acceleration and time for a particle moving with a constant acceleration. (b) A lorry is travelling along a straight road at a constant velocity of 15 m s−1 when the driver notices an obstruction in the road 25 m ahead. His reaction time is 0.40 s and the brakes can produce a deceleration of 7.0 m s−2. Calculate whether the driver will stop the lorry in time.
Answer E4
(a) The required equation is
υx = ux + axt(Eqn 11)
The derivation of this equation is given in Subsection 5.2
(b) Before the driver has time to apply the brakes the lorry is travelling at a constant velocity ux1 = 15 m s−1. So,
according to Equation 8,
sx = uxt(Eqn 8)
its displacement from its initial position when the brakes are applied is
sx1 = 15.0 m s−1 × 0.40 s = 6.0 m
When the brakes are applied ux2 = 15 m s−1, υx2 = 0 m s−1 and ax2 = −7.0 m s−2.
So, using Equation 14,
υx2 = ux2 + 2axsx(Eqn 14)
the additional displacement will be given by
$\displaystyle s_{x2} = \frac{\upsilon_{x2}^2-u_{x2}^2}{2a_{x2}} = \frac{[0-(15)^2]\,\rm{m^2s^{-2}}}{-2 \times 7.0\,\rm{m\,s^{-2}}} = 16\,\rm{m}$
Thus the total stopping distance (to two significant figures) will be | sx1 | + | sx2 | = (6.0 + 16) m = 22 m. So the lorry can stop with 3 m to spare!
(If you had any difficulty with this question, reread the problem posed in Subsection 1.1 and its solution in Subsection 5.3.)
Study comment This is the final Exit test question. When you have completed the Exit test go back and try the Subsection 1.2Fast track questions if you have not already done so.
If you have completed both the Fast track questions and the Exit test, then you have finished the module and may leave it here.
Study comment Having read the introduction you may feel that you are already familiar with the material covered by this module and that you do not need to study it. If so, try the following Fast track questions given in Subsection 1.2. If not, proceed directly to Ready to study? in Subsection 1.3.